
株式会社小野測器により出願された特許
61 - 70 / 230
測定装置
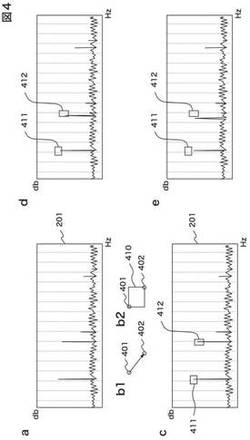
【課題】良否判定機能を備えた測定装置において、良否判定条件をより多様かつ簡易に設定可能とする。
【解決手段】
グラフ201上でボックスの描画操作(b1、b2)を受けつけてボックス411、412を描画/表示する(c)。良否判定条件の設定完了を指示されたならば、その時点で表示されているボックスの各々を良否判定基準図形として設定する。デジタル信号処理部3の良否判定部32は、良否判定基準図形であるボックス内に、特性データが表す特性波形のピークの座標が存在する場合(d)に、当該良否判定基準図形に対応する良否判定結果を良とし、他の場合に(e)、当該良否判定基準図形に対応する良否判定結果を否とする。
(もっと読む)
応答曲面モデル作成装置及び応答曲面モデル方法及び応答曲面モデルプログラム

【課題】分割した領域に属する標本に近似しない線形モデルを作成するような不具合のない応答曲面モデルを作成すること。
【解決手段】因子値及び応答値からなる標本を入力する入力部1と、入力部1により入力される標本を空間上に配置する標本配置部21と、領域に属する前記標本の座標値に基づいて、領域毎に線形モデルを作成する線形モデル作成部230と、領域に属する標本に基づいて線形モデルを分割する領域分割部22と、分割される前記領域に属する標本に基づいて、領域を分割不可と判定する分割領域判定部221と、分割領域判定部221により全領域において分割不可と判定されたときに、各線形モデルを空間上に配置して応答曲面モデルを作成するモデル作成部23とを備える。
(もっと読む)
多目的最適解集合算出装置及び多目的最適解集合算出方法及び多目的最適解集合算出プログラム
【課題】所定の駆動基準を充足する全体最適解の集合を算出すること。
【解決手段】複数の駆動状態の複数の組み合わせ毎に基づいて算出されたトレードオフ関係にある複数の目的関数の組み合わせを最小化又は最大化する設計変数の部分最適解の集合と、複数のステップから構成されステップ毎に前記駆動対象の駆動条件が異なる駆動基準のステップ毎の駆動条件の値を入力する入力部1と、複数の駆動状態の複数の組み合わせ毎に抽出される部分最適解に基づいて、駆動状態の範囲内の部分最適解を予測可能な達成値マップを作成する達成値マップ作成部201と、駆動状態の項目毎に作成される達成値マップから達成値を抽出する達成値抽出部202と、達成値を前記駆動基準のステップ毎に積算して算出される総和達成値から全体最適解の集合を算出する全体最適解算出部21とを備える。
(もっと読む)
音源同定装置および音源同定プログラム
【課題】本発明は、規定以上の音を発している車両や音源を同定する音源同定装置等に関し、高音域だけでなく、低音域についても正確に同定する。
【解決手段】車両通行路を走行する車両から発せられた音を受音することにより得られた原音信号から抽出した、高周波抽出対象音域の音成分を表わす第1の音信号に基づくビームフォーミング演算により音源位置を算出する第1の音源算出部と、原音信号から抽出した低周波抽出対象音域の音成分を表わす第2の音信号に基づく音響インテンシティ演算により音源位置を算出する第2の音源算出部と、第1の音源算出部により算出された音源位置と第2の音源算出部により算出された音源位置とに基づいて音源を同定する音源同定部とを備えた。
(もっと読む)
シャシダイナモメータ
【課題】より現実の状況に即した態様で、前輪と後輪に、所望の速度差を与える。
【解決手段】前輪用シャシダイナモメータ2のモータ23と後輪用シャシダイナモメータ3のモータ23の回転速度を制御し、前輪用シャシダイナモメータ2のローラ22の周速度LVFと後輪用シャシダイナモメータ3のローラ22の周速度LVRとの平均速度MVが所定速度未満であるときには、平均速度MVが0から指定平均速度n×TrgΔVまで大きくなるにつれて、周速度LVFと周速度LVRの速度差ΔVが0から漸増し、平均速度MVがn×TrgΔVとなったときに目標速度差TrgΔVとなるようにする。また、平均速度MVが指定平均速度n×TrgΔV以上であるときには、速度差ΔVが目標値TrgΔVを維持するようにする。
(もっと読む)
シャシーダイナモメータ
【課題】ローラを完全にカバーした状態においても車輪の位置合わせを可能とする。
【解決手段】ローラカバー6は、左右方向と垂直な面を断面とする断面形状が、下方に開いた弧形状を有する板状部材であり、ローラ2の側方に位置しローラ2の上部を全く覆わない位置と、ローラ2の上方に位置し、ピットカバー1に設けられた開口部11に露出しているローラ2の上部を完全に覆う位置と間を任意に移動させることができる。そして、センタリング装置5のアーム51を伸ばすと、アーム51は、ローラカバー6を収容した状態ではピットカバー1の開口部11の内の、ローラ2とピットカバー1との間の隙間を通って斜め上方に移動し、ローラカバー6でローラ2をカバーした状態ではピットカバー1の開口部11の内の、ローラカバー6とピットカバー1との間の隙間を通って斜め上方に移動し、駆動輪100を位置決めする。
(もっと読む)
信号処理装置、信号処理装置の制御方法及び信号処理装置用制御プログラム
【課題】回転一次ピークの追従性を向上させ、変動する回転数を応答よく正確に検出することができる回転計、回転計の制御方法及び回転計用制御プログラムを提供する。
【解決手段】入力された信号を、高速フーリエ変換するFFT(Fast Fourier Transformation)演算手段(12a)と、記憶手段(16)にピークスペクトルデータが記憶されているか否かを判断する判断手段(12b)と、スペクトルデータを探索する探索手段(12d)と、スペクトルデータの周波数の略n倍の周波数のスペクトルデータと前記スペクトルデータの周波数の略1/n倍の周波数のスペクトルデータ(ここで、nは2以上の自然数)を検索する検索手段(12e)と、を備えることを特徴とする。
(もっと読む)
回転角センサ
【課題】比較的簡易な構造で、漏れ磁束による精度劣化を抑制する。
【解決手段】非磁性導電体のロータ20と、ロータ20の外周側に配置した非磁性導電体のステータ30とに、各々周方向に等角度間隔で配置した複数のスリットを設け、ステータ30の外周側に設けた駆動コイル40で発生した磁束を、ロータ20の内周側に設けた検出コイル50で検出する。そして、測定回路60において、検出コイル50で検出した磁束の位相変化を測定し、検出信号として出力する。
(もっと読む)
シャシーダイナモメータ
【課題】ローラをカバーした状態においても車輪の位置決めを可能とする。
【解決手段】ローラカバー61は、ピットカバー1の下方に全体が収容されてローラ2をピットカバー1の上に露出させる位置(a1)と、ローラカバー61の断面弧形状の部分がローラ2の頂上部を覆ってローラ2がピットカバー1の上に露出しないように覆う位置との間で、ローラ2の周面に沿って移動する。また、センタリング装置5において、アーム51を縮めた状態から、アーム51を伸ばすと、アーム51は、ローラカバー61を収容した状態ではピットカバー1の開口部11の内の、ローラ2とピットカバー1との間の隙間を通って、斜め上方に移動し(b1)、ローラカバー61でローラ2をカバーした状態ではピットカバー1の開口部11の内の、ローラカバー61とピットカバー1との間の隙間を通って、斜め上方に移動し(b2)、車輪の位置決めを行う。
(もっと読む)
最適値を探索する方法及び装置
【課題】ECU制御項目の中で、遅れ要素を持った制御項目の設定項目について最適値を迅速に求める方法及び装置を提供すること。
【解決手段】最適値探索装置10は、設定項目の初期値において、ECU制御を行った場合の測定項目を測定し、引き続き設定項目をスイープしながら測定項目の測定を行い、初期における測定及びスイープしながらの測定における一連の測定値の変化にフィットする二次曲線を求め、求めた二次曲線の傾きの最大値を傾きとし初期値における測定値を切片とする直線と、ECU制御の測定項目の所定の制限値と、の交点を求め、求めた交点を限界値と予測する。
(もっと読む)
61 - 70 / 230
[ Back to top ]