
株式会社日本システム研究所により出願された特許
1 - 5 / 5
生体組織機能状態測定装置及びその方法
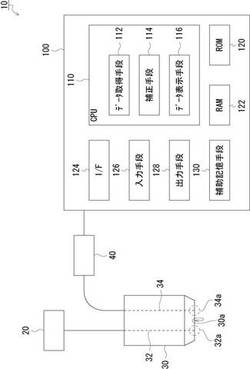
【課題】皮膚表面からの感性評価だけでは難しい、皮膚の創傷部の定量的評価を可能にする。
【解決手段】光源20、プローブ30及びデータ処理部100を備えて構成される。光源は、入力光を生成する。プローブは、入力光を生体表面に照射する照射部32aと、入力光の、生体内部における散乱光を受光するための受光部34aとを有する。データ処理部は、測定対象部位の光強度を、基準部位の光強度で補正することにより、個体差の影響なく生体内部を測定した波長ごとの光の吸収散乱特性を検出する。ここで、プローブは、照射部と受光部の間隔が異なる複数の組を有している。
(もっと読む)
推進工法における管路の位置検出方法、その装置及び当該装置を用いた推進工法

【課題】小口径管の推進工法において、高精度の位置計測と迅速な施工を実現できる埋設管路の位置検出方法。
【解決手段】内管の隣接する一方の内管に投光部7を、他方の内管に受光部8を相対向して設け、前記投光部8に設けた第1レーザ照射器9からレーザ光を、第1ハーフミラー10を通して前記受光部8の可動ミラー12に照射し、ここで反射した光を投光部7の第1ハーフミラーで反射させて第1CMOSセンサー11でこれを受け、隣接する内管が直線接続されている状態では、前記第1CMOSセンサー11の原点で前記レーザ光を受光し、前記隣接する内管が屈曲接続されている状態では、前記第1CMOSセンサー11の原点からずれた箇所で前記レーザ光を受光し、レーザ光が原点からずれた箇所で受光した場合に、前記可動ミラー12を動かして前記レーザ光の受光点を原点に戻し、その時の前記可動ミラーの動きを計測して折曲角度を検出する。
(もっと読む)
姿勢認識センサ
【課題】ロボットの関節部に用いられてきた姿勢センサは測定できるパラメータが限られ、他の座標変換パラメータを無視するために関節部の数が増大すると末端部での誤差が許容できない値になるという問題があった。
【解決手段】関節部の一方の剛体に固定された互いに線形独立な3本以上の光線を発するレーザー光源群と、他の剛体に固定された上記の光線を受けるCCDなどのエリアセンサと、エリアセンサ上の受光点の座標から座標変換パラメータを計算する演算装置から構成される。これによりすべての座標変換パラメータをひとつのセンサにより精度良く測定することが出来る。エリアセンサの前に直交する2軸廻りに回転する可動式ハーフミラーを設け、ハーフミラーの回転角とハーフミラーによって反射された光線の基準値からのずれを測定することにより、精度の高いパラメータの測定が可能となる。
(もっと読む)
電磁波を用いた表面部の油脂成分の検査方法及び装置
【課題】表面部の油脂成分を確実に再現性良く迅速に検査可能な表面部の油脂成分の検査方法及び装置を提供する。
【解決手段】プローブ1に備えた測定端面10に設けた窓(14)を介して、プローブ内部から検査対象の表面8に電磁波を放射し、その透過または反射された前記電磁波から油脂成分を演算して検出する。
(もっと読む)
非接触伝送装置
1 - 5 / 5
[ Back to top ]