
古野電気株式会社により出願された特許
101 - 110 / 441
導波管変換器及びレーダ装置
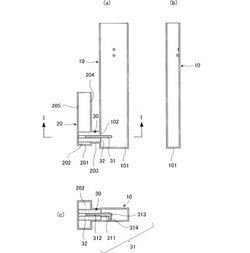
【課題】1の導波管から他の導波管へマイクロ波を導く簡易な構造を有しかつ簡易に製造可能な導波管変換器を提供する。
【解決手段】導波管変換器30を構成する、所要厚を有する長尺の内側導体31は、長尺方向の一端側で、第1の幅を有し、導入用導波管部10内に露出する第1部位311と、長尺方向の他端側で、第1の幅より狭い第2の幅を有し、給電用導波管部20内に露出する第2部位312と、第1部位311の適所に、突出して形成された第3部位313と、第1部位311及び第3部位313の少なくとも一方から直交する方向に所定長だけ延設された支持部位314とを有する。
(もっと読む)
方位検出装置

【課題】磁場の影響を受けることなく、静止状態でも、アンテナの向きの方位を正確かつ迅速に検出することができる方位検出装置を提供する。
【解決手段】方位検出装置が備える衛星データ入力部51には、GPSアンテナ11がGPS衛星から受信した信号に基づいて取得される当該GPSアンテナ11から見たGPS衛星の方位を示す方位情報と、受信した信号の信号レベルと、が入力される。複数のGPS衛星からの信号をGPSアンテナ11が受信すると、フィッティング処理部52は、それぞれのGPS衛星の方位と信号レベルとの関係に、GPSアンテナ11の所定方向に対する角度に応じて変化する信号レベルの傾向から導き出された関数を適合する。そして、方位算出部55は、フィッティング処理部52により適合された関数によって算出される算出信号レベルの傾向に基づいて、GPSアンテナ11の向きを算出する。
(もっと読む)
GNSS受信機、航法装置、信号処理装置、GNSS速度補正プログラム及びGNSS速度補正方法
【課題】アンテナの動揺による速度測定値の誤差を遅延無く除去することが可能であり、しかも特別な設定作業等を行う必要が無いGNSS受信機を提供する。
【解決手段】本実施形態のGPS受信機2は、GPSアンテナ4と、GNSS位置・速度算出部11と、磁気方位センサ5と、傾斜センサ6と、動揺速度除去部15と、を備えている。GPSアンテナ4は、船舶に取り付けられ、GPS衛星からの測位用信号を受信する。GPS位置・速度算出部11は、測位用信号に基づいて、GPS速度を算出する。磁気方位センサ5は、船舶の船首方向の絶対方位を検出する。傾斜センサ6は、GPSアンテナ4の傾斜角を検出する。動揺速度除去部15は、絶対方位及び傾斜角に基づいて、GPSアンテナ4の動揺による誤差を算出してGPS速度から除去する。
(もっと読む)
画素データ生成装置、画像表示装置、レーダ装置、画素データ生成方法及び画素データ生成プログラム
【課題】レーダ装置等の画像表示装置が備える画素データ生成装置において、周方向を考慮した補間データを画素抜け部分に漏れなく描画できる構成を提供する。
【解決手段】レーダ装置の画像表示装置が備える画素データ生成装置は、エコー強度計算部と、補間内容生成部と、を備える。エコー強度計算部は、スイープラインS1上のサンプルデータと、スイープラインS2上のサンプルデータと、をXY直交座標系の画素データにそれぞれ変換する。補間内容生成部は、XY直交座標系のX軸又はY軸に平行な補間対象ライン上にある注目画素と、同一の補間対称ライン上にある対応画素と、の間に位置する対象画素の画素データを生成する。この対象画素の画素データは、スイープラインS1上の画素データとスイープラインS2上の画素データとに基づいて生成される。
(もっと読む)
電子機器、航法装置、バージョンアッププログラム及びバージョンアップ方法
【課題】内部記憶媒体に記憶されるプログラムのプログラムファイルが破損等している場合でも、外部記憶媒体を用いてプログラムのバージョンアップを実行できる電子機器を提供する。
【解決手段】プロッタ装置10は、記憶装置22と、CPUと、モード切替回路と、を備える。記憶装置22は、本体の内部に配置される。CPUは、通常の起動時は、記憶装置22からメインプログラムを読み込み、実行する。モード切替回路は、起動時に、本体の外部から接続されるメモリカード30を用いてメインプログラムのバージョンアップを行う内容の切替信号が入力された場合は、CPUが、メモリカード30に記憶されるバージョンアッププログラムを実行するように、プログラムの読込み先を記憶装置22からメモリカード30に切り替える。
(もっと読む)
移相器
【課題】スタブ間隔が1/4波長未満であってもインピーダンス整合を取ることができる移相器を提供する。
【解決手段】主線路11には、線路幅が異なる箇所(整合線路)が2箇所設けられている。移相器1は、これら整合線路部12Aおよび整合線路部12Bに、それぞれスタブ13Aおよびスタブ13Bが接続されている。整合線路部12Aは誘導性であり、接続されているスタブ13Aが容量性であるため、主線路部11A側から見て整合線路部12Aのスタブ接続箇所まで、十分にインピーダンス整合が取れていることになる。同様に、整合線路部12Bは誘導性であり、接続されているスタブ13Bが容量性であるため、主線路部11C側から見て整合線路部12Bのスタブ接続箇所まで、整合線路部12Bは十分にインピーダンス整合が取れていることになる。
(もっと読む)
レーダ装置、物標速度検出方法、及び、物標速度検出プログラム
【課題】不定性を生じさせることなく、物標の相対速度を広範囲にわたって検出可能なレーダ装置を提供する。
【解決手段】船舶用レーダ装置は、信号発生部と、送信タイミング制御部と、相関処理部と、速度検出部と、を備える。信号発生部は、送信パルス信号を発生させる。送信タイミング制御部は、連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する。相関処理部は、送信パルス信号の波形と、物標で反射した受信信号の波形と、の相関処理を行う。速度検出部は、異なる送信間隔で送信された複数のパルス信号に対する相関処理結果に基づいて、物標の速度を検出する。
(もっと読む)
導波管接続構造及びレーダ
【課題】広帯域で低反射特性を有し、必要に応じて直角以外の角度でも接続できるようにした導波管接続構造、及びそれを備えたレーダを構成する。
【解決手段】導波管接続構造101は、第1の導波管10と第2の導波管20とが接続部123で直角に接続されている。第2の導波管20は、接続部123から長さc21に亘って、幅a21が本来の幅a2とは幅が異なる変成部21を備えている。この変成部21の長さc21は、伝搬すべき電磁波の管内波長の略1/4に相当する。接続部123には導波管半波長共振器30が並列接続されている。この導波管半波長共振器30は、接続部123側が開口され、終端が短絡されていて、第2の導波管20の電磁波伝搬方向(長手方向)に延びるように配置されている。
(もっと読む)
ドップラー計測器および潮流計
【課題】耐ノイズ性能に優れ、かつドップラーシフト量を高精度で計測できるドップラー計測器を提供する。
【解決手段】重心計算区間Wt[1:n]はパワースペクトルPt[fi]のピークを含む区間であり、この区間Wt[1:n]ごとに重心周波数fwt[1:n]が算出される。仮ドップラーシフト量は、パワースペクトルPt[fi]、Pr[fi]の相互相関処理の出力が最大となるときの周波数シフト量である。重心計算区間Wt[1:n]に対応付けられた重心計算区間Wr[1:n]は仮ドップラーシフト量に基づいて決められ、この区間Wr[1:n]ごとにパワースペクトルPr[fi]の重心周波数fwr[1:n]が算出される。重心周波数fwr[1:n]、fwt[1:n]の差に対してドップラーシフトの周波数依存性の補償などが行われてドップラーシフト量fdが求められる。ドップラーシフト量fdによって重心計算区間Wr[1:n]の周波数範囲が補正され、ドップラーシフト量fdは収束するまで繰返し求められる。
(もっと読む)
方位線及び距離線の表示装置、この表示装置を備えるレーダ装置及び方位線及び距離線の表示方法
【課題】レーダ装置等に用いられる表示装置において、方位線又は距離線を表示する機能をOFFした場合でも、目標の方位及び距離の両方をオペレータが把握できる構成を提供する。
【解決手段】表示装置は、ダイヤル部と、表示制御部と、を備える。ダイヤル部は、EBL71の向きを設定するとともに、EBL71を表示するEBL表示機能のON/OFFを切り替えるためのものである。また、ダイヤル部は、VRMの位置を設定するとともに、VRMを表示するVRM表示機能のON/OFFを切り替えるためのものでもある。表示制御部は、EBL表示機能がONでVRM表示機能がOFFの場合は、VRMの位置に基づいて距離マーク81をEBL71とともに表示する。また、表示制御部は、EBL表示機能がOFFでVRM表示機能がONの場合は、EBLの向きに基づいて方位マークをVRMとともに表示する。
(もっと読む)
101 - 110 / 441
[ Back to top ]