
古野電気株式会社により出願された特許
71 - 80 / 441
自己供給型未来エフェメリスおよびクロック予測を備えた衛星航法受信機
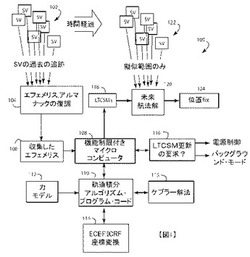
【課題】ナビゲーション・システム衛星用のエフェメリスを含んだ航法メッセージを復調することが可能な完全自律型の衛星航法受信機を提供する。
【解決手段】特定の衛星ビークルに作用する加速度の力モデルを含み、受信機専用である。各SV(衛星ビークル)のエフェメリスについての単一の観測は、その対応する力モデルに各SVの軌道位置を積分することによって、今後の何日かを入力され伝搬される。それぞれのSVからの航法メッセージを直ちに得て復調することができない場合、完全自律型の衛星航法受信機は、その後、代替物として使用することができる拡張エフェメリス予測が利用可能となる。
(もっと読む)
フィルタと、これを用いた導波管ジョイント、レーダー装置およびマグネトロン

【課題】スプリアス放射を除去するフィルタを備えたマグネトロン、レーダー装置を小型化する。
【解決手段】導電性を有する柱状の内導体1と、この全周を覆う導電性の外導体2を備え、内導体1は柱の中心軸に対して所定長に亘って略平行に形成された間隙部3を有している。間隙部3の長さは、通過帯域フィルタとして用いる場合は電波の主発振モードの周波数に対応する波長の略4分の1の長さ、スプリアス放射など不要成分を除去する場合は当該成分の周波数に対応する波長の略4分の1の長さを有している。中心軸にカソード、その周りの円周上にアノードベーンが配置されるアノードからなるマグネトロンの上記カソードの中心軸に合わせて上記フィルタが配置される。レーダー装置は、上記マグネトロンとアンテナの間で電波を導波する導波管の内部に上記フィルタが配置される構成を有する。
(もっと読む)
重畳画像生成装置及びそれを備える重畳画像表示装置
【課題】画像処理に掛かる負荷を分散させつつ画像の重ね合わせ処理を行うことができる重畳画像生成装置を提供する。
【解決手段】重畳画像生成装置5は、画像生成部30,40と、受信部11と、重ね合わせ回路10と、を備える。画像生成部30,40は、互いに異なるオペレーティングシステムで動作する。受信部11は、画像生成部30,40で生成された画像データ及び加工画像データを映像データとして受信する。重ね合わせ回路10は、画像生成部30,40とは別のハードウェアから構成されており、受信部11が受信した映像データを、予め設定された優先順位に基づいて重ね合わせる。
(もっと読む)
干渉除去装置、信号処理装置、レーダ装置、干渉除去方法およびプログラム
【課題】干渉信号を正確に除去することを可能とする。
【課題手段】複数の複素受信信号を記憶するメモリ331と、複数の複素受信信号から干渉信号を検出する検出器333と、複数の複素受信信号に基づいて干渉信号を含む複素受信信号の物標信号成分を算出する算出器3341、および、当該複素受信信号を物標信号成分に置き換える置換器3342を有する推定器334とを備え、算出器3341は、複数の複素受信信号の振幅に基づいて物標信号成分の振幅を決定する振幅決定器33411と、複数の複素受信信号の位相に基づいて物標信号成分の位相を決定する位相決定器33412とを有する。
(もっと読む)
指針型表示器のモータ制御装置
【課題】機械式のアナログ式表示器に用いられ、指針を滑らかに移動させることによって見た目に違和感のない指針型表示器を実現するモータ制御装置を提供する。
【解決手段】モータ駆動制御部11は、所定時間毎に順次入力されるデータDaをデータ受信部10が複数受信すると、受信した複数のデータDaのうち少なくとも最初に受信したデータDaと最後に受信したデータDaから指針の回転量を算出するとともに、最初のデータDaを受信してから最後のデータDaを受信するまでの時間を指針の移動時間に設定する。またモータ駆動制御部11は、上記移動時間で上記回転量だけ指針を連続的に回転させる回転速度であって、上記移動時間の中間期間に比べて上記移動期間の開始期間及び終了期間が低速となる回転速度を算出し、指針が上記回転速度で回転するようにモータ駆動部12を制御する。
(もっと読む)
スロットアレイアンテナ及びレーダ装置
【課題】船舶などのような動揺する場所で用いられてもサイドローブが抑制される安価なスロットアレイアンテナを提供する。
【解決手段】放射用導波管30は、放射用スロット31がy軸方向及びx軸方向に複数並べて形成されている正面アルミニウム板30aを有している。この正面アルミニウム板30aは、x軸方向に電磁波を導くための導波空間の一側面を構成する。格子40は、金属壁41が正面アルミニウム板30aのy軸方向及びz軸方向に延びるように各々が配置されている。そして、この金属壁41は、放射用スロット31の行に合わせて繰り返し配置される。これら多数の金属壁41は、金属基板42によって連結して固定されている。クリップ50は、金属基板42を放射用導波管30の正面アルミニウム板30aに留めることによって、放射用導波管30に格子40を留める。
(もっと読む)
閾値設定方法、物標探知方法、閾値設定プログラム、物標探知プログラム、および物標探知装置
【課題】不要成分と物標とを識別する閾値を、物標の有無に影響されずに自動で設定する。
【解決手段】注目の距離位置[n]のエコーレベルEcho[n]と、近接位置[n−1]のエコーレベルEcho[n−1]との差分値diff[n]を算出する(S101)。差分値diff[n]が閾値γよりも高ければ(S102:Yes)、注目の距離位置[n]のエコーレベルEcho[n]と閾値レベルTh[n]とから新たな閾値レベルTh[n]を設定する(S105)。一方、差分値diff[n]が閾値γ以下であれば(S102:No)、注目の距離位置[n]のエコーレベルEcho[n]と閾値レベルTh[n]、および近接位置[n−1]の閾値レベルTh[n−1]とから新たな閾値レベルTh[n]を設定する(S106)。
(もっと読む)
水中探知装置
【課題】ノイズのレベルに影響されることなく、対象物のエコーを確実に視認できる探知画像を生成する。
【解決手段】TVG処理部41は、受信信号EB(t)をTVG処理し、受信信号EBc(t)を生成する。平均レベル算出部42は、複数の受信信号EBc(t)における同一距離位置の方位方向に沿った各信号レベルの平均レベルAV(t)を算出する。閾値設定部43は、距離に応じた閾値Th(t)を設定する。ゲイン設定部44は、平均レベルAv(t)が閾値Th(t)以上であればゲインG(t)=Th(t)/Av(t)を設定し、平均レベルAv(t)が閾値Th(t)未満であればゲインG(t)=Coを設定する。乗算器45は、受信信号EBc(t)にゲインG(t)を乗算し、探知画像用信号DD(t)を生成する。探知画像形成部46は、探知画像用信号DD(t)の信号レベルに応じた階調表示の探知画像データを生成する。
(もっと読む)
閾値設定方法、物標探知方法、閾値設定装置、物標探知装置、閾値設定プログラム、および物標探知プログラム
【課題】不要成分と物標とを識別する閾値を、物標の有無に影響されずに自動で設定する。
【解決手段】注目の距離位置[n]のエコー信号のレベルEcho[n]が、閾値レベルTh[n]よりも低ければ、注目の距離位置[n]の閾値レベルTh[n]を低く更新設定する。エコー信号のレベルEcho[n]が、閾値レベルTh[n]よりも高く、閾値レベルTh[n]が注目の距離位置[n]に対してアンテナ側に隣接する距離位置[n−1]の閾値レベルTh[n−1]よりも高ければ、閾値レベルTh[n]を低く更新設定する。エコー信号のレベルEcho[n]が閾値レベルTh[n]よりも高く、閾値レベルTh[n]が注目の距離位置[n]に対してアンテナ側に隣接する距離位置[n−1]の閾値レベルTh[n−1]よりも低ければ、閾値レベルTh[n]を高く更新設定する。
(もっと読む)
GNSS解析システム、GNSS解析装置、及びGNSS解析プログラム
【課題】キネマティック方式とスタティック方式の両者の特徴を活かした基線解析を現場で実施可能な基準局を提供する。
【解決手段】基準局2は、GNSS受信部24と、無線受信部25と、データ処理部41と、時系列取得部40と、を備えている。GNSS受信部24は、GNSS衛星からの電波を受信して自局観測データを取得する。無線受信部25は、GNSS衛星からの電波を受信した計測局3から出力された観測データである他局観測データを取得する。データ処理部41は、所定の繰り返し時間内に取得された自局観測データ及び他局観測データを処理して測位結果を得る。時系列取得部40は、データ処理ステップを、前記繰り返し周期ごとに繰り返し実行して、測位結果の時系列を取得する。そして、時系列取得部40は、繰り返し時間を異ならせた複数の時系列を取得している。
(もっと読む)
71 - 80 / 441
[ Back to top ]