
ヤマハマリン株式会社により出願された特許
1 - 10 / 256
船舶用電動ステアリング装置およびその制御方法
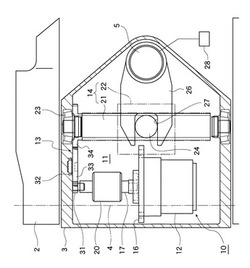
【課題】船舶用電動ステアリング装置において、当て舵を保持するための保舵力を発揮する際に電力を不要とする。
【解決手段】船外機本体7に外部から作用する転舵力に抗して舵角を保持する保舵手段を備えた。保舵手段としては、例えば逆入力遮断クラッチ20を用いた。また、船外機本体7の操舵条件から、船外機本体7の舵角が保持された保舵状態であることを検知し、船外機本体7を操舵する電動モータ12への電力供給を停止するよう制御する。これにより、保舵時には保舵手段により舵角が保持されるため、電動モータ12への電力供給を停止でき、省電力化を測ることができる。
(もっと読む)
転舵制御方法、転舵制御装置および船舶

【課題】電動ステアリング機構の船舶において、電源オフの状態でハンドルとステアリングの片方のみが動いた場合でも、複数のステーションのハンドル回転角が互いにずれている場合でも、操船者に違和感を与えないようにする。
【解決手段】現在のハンドル回転角を検知し(ステップS11)、このハンドル回転角から制御周期1つ前のハンドル回転角を減じてハンドル回転角変化量Δθhを算出する(ステップS12)。次に、舵角比Kを設定し(ステップS13)、ハンドル回転角変化量Δθhに舵角比Kを乗じて目標舵角変化量Δθs*を算出する(ステップS14)。最後に、目標舵角変化量Δθs*を制御周期1つ前の目標舵角θs*-1に足して今回の目標舵角θs*を算出する(ステップS15)。そして、目標舵角θs*に基づいてステアリングを転舵させる(ステップS16、S17)。
(もっと読む)
船舶
【課題】発電機を大型化することなく、舵切り装置の駆動電力を安定供給する船舶を提供する。
【解決手段】複数の船外機12が配設され、該各船外機12毎に発電機42が設けられると共に、該各船外機12毎に、電動モータにて駆動される舵切り装置16が配設され、該舵切り装置16により、前記船外機12を回動させて操舵を行う船舶であって、前記複数の船外機12の内、任意の船外機12の舵切り装置16に、前記他の船外機12の発電機42から電力を供給可能とした船舶。
(もっと読む)
船推進機
【課題】異常が発生した場合であっても操船者の意思どおりに必要最低限の操船ができる、船推進機を提供する。
【解決手段】船推進機10は、電動モータ16、スロットルグリップ36の回動角度を検出するポテンショメータ46、第1停止モードセンサ54a、第2停止モードセンサ54b、およびCPU88と断線・短絡検出回路92とを含むコントローラ28を備える。断線・短絡検出回路92から所定範囲外の電圧信号が与えられている場合、CPU88は、第1停止モードセンサ54aおよび第2停止モードセンサ54bの出力変化に基づいてスロットルグリップ36が指示している運転モードを検出する。そして、前進モードを指示している場合は前進モードかつ所定出力で電動モータ16を駆動させ、また、後進モードを指示している場合は後進モードかつ所定出力で電動モータ16を駆動させる。
(もっと読む)
船舶
【課題】容易に所望の航行意図を実現し易く、快適な操作感を得易い船舶を提供する。
【解決手段】船舶10の所定位置に付与される推進力又は抵抗力の大きさ及び/又は方向を調整可能な操船機器20xを複数備えると共に、複数の操船機器20xを操作する操作機器30xと、複数の操船機器20xをそれぞれ駆動するアクチュエータと、操作機器30xの操作状態に基づいてアクチュエータの駆動量をそれぞれ制御する制御装置13とを備え、制御装置13は、船舶10の航行状態を検知する航行状態検知手段50と、操作機器30xの操作状態を検知する操作状態検知手段60と、航行状態及び操作状態に基づいて操船者の航行意図を推定する航行意図推定手段70と、航行意図に基づき、複数の操船機器20xから制御対象の操船機器20xを選定して、それを駆動するアクチュエータの駆動量を制御する操船機器制御手段80とを備えている。
(もっと読む)
アルマイト処理アルミニウム系金属材料用の表面処理剤
【課題】アルマイト処理された船舶推進用エンジン等部材用アルミニウム系金属材料の表面に、従来使用されていた6価クロムを含むことなしに、高い一次防錆性(裸耐食性)と塗装密着性(塗装下地性)を兼備した表面処理皮膜を形成し得る表面処理剤を提供する。
【解決手段】Zrイオン、3価Crイオン、Alイオン及びビグアニド化合物をそれぞれ特定量含み、かつpHが2.5〜6の水性液であるアルマイト処理アルミニウム系金属材料用の表面処理剤。
(もっと読む)
エンジンの燃料供給装置
【課題】油面のヘッド差を大きくすることなく、燃料ポンプが作動していないときのエンジンの始動性を改善できるエンジンの燃料供給装置を提供する。
【解決手段】燃料タンク24を、少なくとも燃料満杯時の油面aが気化器20のフロート室20b内の必要最低油面bより高い位置となるよう配置し、燃料ポンプ25をバイパスするバイパス通路35を設けるとともに、該バイパス通路35に開閉弁36を配置する。
(もっと読む)
接続機器およびプログラム
【課題】船舶に搭載されたネットワークに接続される接続機器において、上位互換性を確保し、ユーザビリティを向上させる。
【解決手段】ネットワークを経由して送信される任意のメッセージ中のPGN(通信ID)に基づき、このネットワークのプロトコルを識別する(ステップS3)。このネットワークのプロトコルに応じて機器用プロトコルを決定する(ステップS7、S8)。この機器用プロトコルに準拠してネットワークとデータ通信を行う。これにより、接続機器がネットワークに接続されると、接続機器が自らネットワークのプロトコルを識別して適宜作動する。そのため、上位互換性が確保され、ユーザビリティが向上する。
(もっと読む)
機器認証制御方法、機器認証制御装置および船舶
【課題】船舶に搭載されたネットワークに接続機器を接続する際に、特定の接続機器を認証除外扱いできるようにする。
【解決手段】ネットワークに接続機器が接続された際に、接続機器が認証除外機器に該当するか否かを判定する(ステップS3)。接続機器が認証除外機器に該当しない場合、この接続機器に対する認証動作を行う(ステップS4〜S8)。接続機器が認証除外機器に該当する場合、この接続機器に対する認証動作を免除する(ステップS8)。これにより、接続機器が認証除外機器に該当しない場合は認証動作が行われるのに対して、接続機器が認証除外機器に該当する場合は認証動作が免除される。その結果、特定の接続機器(認証除外機器)を認証除外扱いとすることができる。
(もっと読む)
エンジン情報通信方法、ゲートウェイおよびプログラム
【課題】船外機が取り付けられた船舶において、非標準表示機器が接続されても、エンジン情報の表示品質を確保する。
【解決手段】船外機6のエンジン情報を送信する第1の通信ネットワークN1には、ゲートウェイ20を介して第2の通信ネットワークN2が中継されている。標準表示機器P1が第1の通信ネットワークN1に接続されている場合に、第2の通信ネットワークN2に船外機6のエンジン情報を送信する。これにより、標準表示機器P1が第1の通信ネットワークN1に接続されていることが、第2の通信ネットワークN2へのエンジン情報送信の前提条件となる。そのため、非標準表示機器P2が第2の通信ネットワークN2に接続された場合であっても、エンジン情報を標準表示機器P1に確実に表示して操船者に正確に伝えることができる。
(もっと読む)
1 - 10 / 256
[ Back to top ]