
新日本工機株式会社により出願された特許
41 - 50 / 51
バンドソー型切断装置
【課題】ブレードが装着されるホイールの傾きをより精度よく調節できるようにする。
【解決手段】バンドソー型切断装置の装置本体2には、加工用のヘッド12が設けられる。このヘッド12には、支持軸40を介して一対のホイール20a,20bが支持され、これらホイール20a,20bに亘ってブレード22が装着されている。ヘッド12には、モータ56の駆動力により支持軸40を揺動させる揺動機構が組み込まれており、これによりホイール20a,20bの傾きが調節可能となっている。そして、プーリ20a,20bの傾きの調節の際には、支持軸40の傾き角度が検出され、この検出角度がオペレータの入力値(目標角度)と一致するようにNC制御ユニット85によりモータ56が駆動制御される。
(もっと読む)
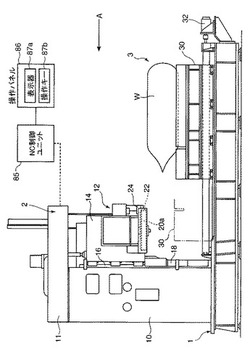
搬送装置およびバンドソー型切断装置

【課題】クーラントの付着からガイドレールを保護する一方で、加工位置においてワークを水平状態に安定的に支持した状態で作業を行えるようにする。
【解決手段】バンドソー型切断装置は、ワークWに対してクーラントを供給しながら加工を施す装置本体2と、この装置本体2の所定の加工位置にワークWを搬送する搬送装置3とを備える。搬送装置3は、ガイドレール36と、これに移動可能に装着されるテーブル30と、このテーブル30を移動させる駆動機構とを備えている。そして、テーブル30のテーブル本体31とガイドレール36との間に、ガイドレール36をその長手方向全域に亘ってレール上面側及び側面側から覆うレールカバー40が設けられ、このレールカバーを避けるようにテーブル30の被案内部32が構成されている。
(もっと読む)
パラレルメカニズム装置、パラレルメカニズム装置のキャリブレーション方法、キャリブレーションプログラム、及び記録媒体
【課題】既知の位置に位置決めしてエンドエフェクタの絶対位置を規定するデータを取得し、微小運動学を用いず、運動学を記述する関係式を直接用いることにより、機構パラメータを正確に同定する。
【解決手段】取得部114は、パラレルメカニズム工作機械1の基準座標系6とすべく当該パラレルメカニズム工作機械1の機械テーブル3上に予め設定された基準座標系6におけるエンドエフェクタ20の位置座標及び姿勢角度座標の全部又は一部と、当該位置座標及び姿勢角度座標の全部又は一部とから逆運動学を用いて算出された駆動軸座標とを所定の測定方法を用いることにより取得する。算出部113は、これらの座標を用いて、パラレルメカニズム機構4の順運動学及び逆運動学のいずれか一方の運動学を記述する関係式を直接用いることにより機構パラメータを算出する。
(もっと読む)
回転工具および工作機械
【課題】 簡単、かつ安価な構成で切刃等を効果的に、かつ効率良く冷却する。
【解決手段】 回転工具20は、先端に切刃22を、後端に主軸(工具ホルダ14)に対する固定軸32をそれぞれ備えている。この回転工具20には、圧縮気体の導入用通路37と、圧縮気体から冷気を生成する冷気発生器40と、ここで生成された冷気を切刃22等に案内する吐出孔36及び通路26等が設けられている。冷気発生器40は、渦流管42を有し、この渦流管42の一端側にその接線方向から圧縮空気を導入することにより当該空気を渦流管42内で高速旋回させつつこの旋回に伴う熱分離作用により軸心部分に冷気を生成しつつ吐出するように構成されている。
(もっと読む)
回転工具
【課題】 工具先端とワークとの間に切粉等が入り込むのを有効に防止し、また、入り込んだ場合でもスムーズ、かつ確実に排出させる。
【解決手段】 回転工具20は、複数の切刃26が周方向に並ぶ切刃配設面24を有する。切刃配設面24の中央部分には突状部28が設けられ、この突状部28の周囲に、該突状部28との間に隙間Rを隔てて切刃の配設領域が設けられ、この領域に複数の切刃26が刃先部分を突状部28から工具先端側に所定寸法だけ突出させた状態で配設される。そして、突状部28の端面に、除屑用のエアを吐出するための吐出口が設けられている。
(もっと読む)
加工装置および同装置を用いた加工方法
【課題】 パラレルメカニズム機構を用いた加工装置に於て、不規則に分散して配置されるワークを合理的に加工できるようにする。
【解決手段】 加工用ヘッド24の位置および姿勢をパラレルメカニズム機構により切換えるように構成された加工装置10。この加工装置10は、台車12を有することにより装置全体が移動可能に設けられる。また、加工用ヘッド24に着脱可能に装着されるプローブ28を有し、このプローブ28をワークの支持テーブルに接触させることにより加工装置10に対するワークの相対的な位置関係を検出するワーク位置検出手段38等と、予め記憶された加工データを上記位置関係に応じた加工データに変換するデータ変換手段36と、ここで変換された加工データに基づいてワークWの加工を行うべくストラッド18を駆動制御する軸制御手段34とを備える。
(もっと読む)
パラレルメカニズム装置
【課題】 エンドエファクタの位置及び姿勢をより精度よく制御できるようにする一方で、その駆動機構をコンパクトに構成することを目的としている。
【解決手段】 加工装置は、6本のストラッド16を備え、これらストラッド16は、ベースフレーム20のノード22に2本1組で可動コア24を介して支持される。ストラッド16は自在軸継手17を介して加工ヘッド18に連結される。可動コア24は、半球型の一対の単位コアからなり、各ストラッド16は単位コア24aを貫通して設けられる。ストラッド16には、レール16aとラック16bとが固定され、単位コア24a内にはレール16aを案内するガイドと、ラック16bに噛合してモータ駆動されるピニオンとが設けられる。単位コア内において、ストラッド16の一方側にはガイドが配設され、他方側にはピニオンが配設され、ストラッド16等に被さるようにモータが配設される。
(もっと読む)
パラレルメカニズム機構のキャリブレーション方法、キャリブレーションの検証方法、キャリブレーションの検証プログラム、データ採取方法及び空間位置補正における補正データ採取方法
【課題】 既知の位置に姿勢を含めて位置決めすることにより、位置決め後の計測を要しないパラレルメカニズム機構のキャリブレーション方法を提供する。
【解決手段】 6本の駆動軸によって、所定の架台に支持されたベースとエンドエフェクタとが連結されたパラレルメカニズム機構において、エンドエフェクタと主軸を一にして取り付けられた調整用工具を、パラレルメカニズム機構の外部に設定された基準座標系上の所定の位置に姿勢を含めて位置決めする。これにより、エンドエフェクタの姿勢を含む正確な位置情報と、そのときの駆動軸の相対座標とを取得し、これらの取得された情報から正確な機構パラメータを同定する。
(もっと読む)
フィルム接合装置
【課題】 準備作業の安全性を高め、また稼働効率を高める。
【解決手段】 フィルム接合ユニット3は、供給部P1にセットしたフィルムカートリッジ12のリールRからフィルムFを引出してラミネート装置1に給送しながらその残量が減ると、待機部P2にセットしたフィルムカートリッジ12からフィルムFを引出して先行フィルムFaに接合するように構成されている。フィルムカートリッジ12には、フィルム押えユニット24が設けられており、リールRから後続フィルム先端を引出してこのフィルム押えユニット24により仮止めしておくと、フィルム接合時には、フィルム引出し装置15のエアチャック46によりこのフィルム先端が挟持されて所定の接合作業高さ位置まで後続フィルムFbが引出される。
(もっと読む)
フィルム接合方法およびフィルム接合装置
【課題】 フィルム接合装置の生産性およびメンテナンス性の向上。
【解決手段】 先行フィルムFaと後続フィルムFbとの重ね合わせ部分の両端部分にそれぞれレーザ光を照射し、その透過光を受光することによりレーザ光の受光幅αn,βnを検出し、この検出幅αn,βnの合計値(総受光幅)が、一のフィルムの両端部分にレーザ光を照射して同様にその透過光を受光したときの総受光幅である基準値と等しくなるようにフィルムFa,Fbを相対的に幅方向に移動させてフィルムFa,Fbを幅方向に位置合わせし、その後、両フィルムFa,Fbを接合するようにした。
(もっと読む)
41 - 50 / 51
[ Back to top ]