
株式会社日立ハイテクコントロールシステムズにより出願された特許
11 - 20 / 130
ウェーハ接合強度検査装置及び方法
【課題】接合ウェーハを破壊することなく、接合界面に間隙が生じていない場合であっても、局所的な接合部の接合強度を検査することができる検査装置を提供する。
【解決手段】ウェーハ接合強度検査装置100は、接合ウェーハ200を保持する試料ステージ160と、テラヘルツ波を発生するテラヘルツ波発生器151と、接合ウェーハ200を透過又は反射したテラヘルツ波を検出するテラヘルツ波検出器157と、テラヘルツ波検出器157によって検出したテラヘルツ波より接合ウェーハ200のTHz波特性を演算する演算部と、を有する。演算部は、予め求めた基準試料のTHz波特性と接合強度の間の関係から、検査対象の接合ウェーハのTHz波特性に対応する接合強度を演算する。
(もっと読む)
インタフェースモジュール

【課題】データ管理方式が異なる2つのシーケンス制御ネットワークを接続するインタフェースモジュールにおいて、一方のシーケンス制御ネットワークとインタフェースモジュール間で通信異常が発生しても、他方のシーケンス制御ネットワークが誤ったデータに基づいてシーケンス制御を行うのを防止する。
【解決手段】シーケンス制御ネットワークへ送信する通信異常時用の送信データと、シーケンス制御ネットワークに対して送信データを送信するためのデータ送信シーケンスとを備える(S1,S2)。シーケンス制御ネットワークとの間で通信異常が発生したかどうかを判定し(S3)、一方のシーケンス制御ネットワークとの間で通信異常が発生した場合には、他方のシーケンス制御ネットワークへ送信する送信データを、他方のシーケンス制御ネットワークに対するデータ送信シーケンスに従って、他方のシーケンス制御ネットワークへ送信する(S6)。
(もっと読む)
基板搬送装置
【課題】搬送ロボットのθ軸が回転した時の角度誤差を検出することが可能であり、検出した角度誤差からθ軸の角度補正を行う機能を有する基板搬送装置を提供する。
【解決手段】アーム13を有し基板7を搬送する搬送ロボット2と、基板7を外部に搬送するための開口部8とを備える。搬送ロボット2は、θ軸モータによりアーム13を回転させ、R軸モータ110によりアーム13を伸縮させる。開口部8のフレームに、投光器から受光器へセンサ光を投射する検出センサ4、4’を備える。搬送ロボット2が、アーム13を伸縮して、開口部8を通して基板7を搬送する過程において、基板7が検出センサ4及び検出センサ4’のセンサ光を遮光し始めた時と、検出センサ4及び検出センサ4’がセンサ光の遮光が終了して再び受光し始めた時との、R軸モータ110の回転角度を用いて、θ軸モータの回転角度とアーム13の回転角度との差である角度誤差αを求める。
(もっと読む)
ソレノイドコイル式流体レベル計測装置
【課題】流体を収容するタンクの流体レベルを、タンクから流体を取り出すための取り出し管を用いることなく、長時間に亙って正確に測定できる取り出し管が不要な流体レベル計測装置を実現する。
【解決手段】バランス管41には取り出し管は無く、ソレノイドコイル45がバランス管41の外側に巻かれている。ソレノイドコイル45の内部には磁性体47を内包したフロート46が配置されている。フロート46の表面は、その外部から流体及び水素が侵入しないよう金属などのカバー59で覆われている。バランス管41内の液体レベルに応じて、フロート46が移動すると共に、ソレノイドコイル45のインダクタンスも変化する。このソレノイドコイル45のインダクタンスを測定することによって取り出し管を用いることなくバランス管41内の液体レベルを計測することができる。
(もっと読む)
汚泥炭化処理の温度制御方法、および汚泥炭化処理設備
【課題】汚泥炭化処理設備において、汚泥の自燃を考慮したうえで、炭化炉の燃焼温度を一定に保つことができる温度制御方法を提供する。
【解決手段】切出し装置が備える回転部の回転により汚泥を切出して炭化炉に供給し、炭化炉で汚泥を燃焼させて炭化処理する汚泥炭化処理の温度制御方法において、炭化炉内の温度を計測し(S202)、炭化炉内の温度が予め定めた温度以上(S203)に、予め定めた時間以上(S205)なっている場合には、切出し装置の回転部の回転数を減少させる(S206)。
(もっと読む)
計装用操作卓
【課題】煩雑な操作をすることなく所望のトレンドグラフを表示することが可能であり、かつ、異常発生時のプロセスデータが上書きされて保存できなくなることを防止できる計装用操作卓を提供する。
【解決手段】プロセス製造装置を監視制御するプロセス監視制御システムに用いられ、プロセス製造装置のプロセスデータを収集・蓄積する計装用操作卓1において、プロセス製造装置についての情報であるフィードバック制御情報13Aと、プロセスの工程についての情報であるシーケンス制御情報13Bとを有する。プロセス製造装置からの警報を受信し、フィードバック制御情報13Aとシーケンス制御情報13Bとに基づいて、警報を発生させたプロセス製造装置のプロセスデータ13Cと、このプロセス製造装置に関連するプロセス製造装置のプロセスデータ13Cとを取得し、取得したこれらのプロセスデータ13Cをトレンドグラフ11Bとして表示する。
(もっと読む)
通信異常遮断装置およびプロセス制御装置
【課題】プロセス制御装置のCAN通信回線上において、プロセス入出力部の通信異常を検知し、通信異常を起こしているプロセス入出力部を特定して、他のプロセス入出力部の通信に影響を与えないように通信を遮断することが可能な通信異常遮断装置を提供する。
【解決手段】CAN通信回線で接続されるプロセス制御コントローラ1とプロセス入出力部6とを備えるプロセス制御装置に用いられる通信異常遮断装置3であり、CAN通信回線上に設置され、プロセス制御コントローラ1との通信を送受信する第1のトランシーバと、プロセス入出力部6との通信を送受信する第2のトランシーバを備える。プロセス入出力部6〜8から受信した通信のドミナントが、設定時間内に設定回数以上、6ビット連続した場合には、第1のトランシーバと第2のトランシーバを接続してプロセス入出力部6からプロセス制御コントローラ1への通信を伝送している通信回線を切断する。
(もっと読む)
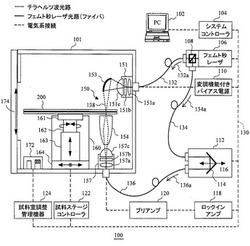
物性測定装置
【課題】
フェムト秒レーザなどの高額な装置を追加することなく、テラヘルツ周波数を用いた物性測定の高速化を図る。
【解決手段】
フェムト秒レーザ1からのレーザはポンプ光3とプローブ光4に分け、ポンプ光3でテラヘルツ波発生素子6を照射する一方、プローブ光4はビームスプリッタ16a、16b、16cで4本に分岐し、夫々時間遅延ステージ13a、13b、13c、13dを介して複数のテラヘルツ波検出素子10a〜10dを照射する。テラヘルツ波検出素子10a〜10dは、プローブ光が照射された瞬間のテラヘルツ波受信強度に応じた電流を出力するので、プローブ光4a〜4dに波形測定範囲の4分の1ずつ遅れ時間を持たせることにより、
測定範囲を4分割して並行処理可能とし、物性測定の高速化を実現する。
(もっと読む)
局所クリーン化搬送装置
【課題】
ファンフィルタユニットの風量を上げることなくダウンフローの流れを維持し、異物の巻き上げ等を抑えて高い局所クリーン性能を発揮する局所クリーン化搬送装置の提供。
【解決手段】
基板搬送ロボット103は往復移動することができ、実線202の位置へ移動した場合、局所クリーン化搬送装置101の側面に設けられた開口量調節機構Aの開口量調節板402を作動して開口部402を開ことで、基板搬送ロボット103により押された空気が側面にぶつかって巻き上がらないようし、矢印403、404、405、406の様に外部へ排出する。
また、基板搬送ロボット103が遠ざかる場合は、開口部401が閉じ、外部からの空気の流入を防ぐ。
(もっと読む)
蛍光X線水質計、および水質管理システム
【課題】
多元素同時分析を可能とし、運転に必要とされる洗浄作業や消耗品交換の保守作業を低減し、測定データをオンライン伝送する水質管理システムにも好適な蛍光X線水質計を提供する。
【解決手段】
測定試料の一部は脱泡槽14の下部からノズル13に導かれ、大気中に噴出することでセル等を用いずに流束を形成し、X線発生素子5からX線を投影する。陰極電圧可変用電源装置6はX線発生素子5が発生するX線のエネルギーが測定目的の元素に固有の蛍光X線エネルギーより大きくなるように調整され、流束から放射される固有の蛍光X線を半導体X線検出素子7で検出し、信号処理装置9で処理することで測定試料中に含まれる複数の元素を同時に測定し、その測定データを管理センターに伝送することで水質管理システムを構成する。
(もっと読む)
11 - 20 / 130
[ Back to top ]