
株式会社エイチアンドエフにより出願された特許
1 - 10 / 57
搬送装置及びそれを用いたワークの搬送方法
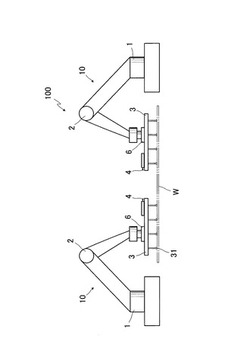
【課題】搬送時におけるワークの撓みによる品質低下やワーク落下を防止できる搬送装置及びそれを用いたワークの搬送方法を提供すること。
【解決手段】本発明は、対向するロボット10が同時にワークWを把持し、該ワークWを搬送する搬送装置100において、各ロボット10が、基部1と、該基部1に回動自在に取り付けられたアーム部2と、該アーム部2の先端に設けられた把持部3と、該把持部3に取り付けられた当接部4とを備え、対向するロボット10の当接部4同士が弾圧的に圧接された状態で、ワークWが搬送される搬送装置10である。
(もっと読む)
シャーリング装置の運転方法

【課題】駆動部分の耐久性を向上させることができ、且つ省エネルギーを実現できるシャーリング装置の運転方法を提供すること。
【解決手段】本発明は、長尺状のシート1をシャーリング装置3の刃部13で裁断してブランク1aとし、該ブランク1aをプレス機械20でプレスするプレス加工におけるシャーリング装置3の運転方法であって、刃部13が一体となって旋回可能な上刃13b及び下刃13aからなり、プレス機械20が、クランク機構によりプレススライド28を昇降移動させ、ブランク1aをプレスするものであり、刃部13がシート1を裁断する裁断サイクルが、刃部13を旋回させる旋回ステップAと、シート1を裁断する裁断ステップBとからなり、裁断ステップBに要する時間を一定とし、旋回ステップAに要する時間を変更可能とすることで、裁断サイクルの周期がプレススライド28の昇降移動によるプレスサイクルの周期に追従されているシャーリング装置3の運転方法である。
(もっと読む)
ワーク停止装置及びそれを用いたワーク停止方法
【課題】ワークが傷付かないようにワークを停止させることができるワーク停止装置及びそれを用いたワーク停止方法を提供すること。
【解決手段】本発明は、走行するワークWを停止させるワーク停止装置100であって、ワークWが走行する基台1と、該基台1に設けられたストッパー体2と、基台1に対して平行に設けられたレール3と、を備え、ストッパー体2が連結部5を介してレール3をスライド可能となっており、ストッパー体2がワークWの進行方向と同じ方向にスライドしながらワークWを停止させるワーク停止装置及びそれを用いたワーク停止方法である。
(もっと読む)
左右2枚送りブランクの位置決め装置及びその位置決め方法
【課題】左右2枚送りブランクを傷付けることがなく、簡単な構成で位置決めが可能な左右2枚送りブランクの位置決め装置及びその位置決め方法を提供する。
【解決手段】X方向に所定の間隔をおいて配置される第1,第2エンドレスベルト15a,15bと、これらエンドレスベルトを別々にY方向に循環移動させる第1,第2Y方向用サーボモータ17a,17bと、これらエンドレスベルトを別々にX方向に移動させる第1,第2ボールねじ機構21a,21bと、これらのボールねじ機構を別々に駆動させる第1,第2X方向用サーボモータ25a,25bと、第1,第2エンドレスベルト上の左右2枚送りブランクの位置を別々に撮像する第1,第2CCDカメラ31a,31bと、撮像された左右2枚送りブランクの位置情報をそれぞれ別々に記憶すると共に、第1,第2Y方向用サーボモータと第1,第2X方向用サーボモータとを制御する制御装置41と、を備える。
(もっと読む)
タンデムプレスラインの制御方法
【課題】プレス機及びロボットの干渉を防止し、シート搬送の効率を向上させることによりプレス加工の生産性を向上させることが可能なタンデムプレスラインの制御方法を提供すること。
【解決手段】第1把持手段23及びプレス前シートW1を含む領域を第1監視領域P1とし、スライド11及び上金型13を含む領域を第2監視領域P2とし、第2把持手段33及びプレス後シートW2を含む領域を第3監視領域P3とし、第1監視領域P1と第2監視領域P2との第1最短距離T1と、第1監視領域P1と第3監視領域P3との第2最短距離T2と、第2監視領域P2と第3監視領域P3との第3最短距離T3とを監視し、プレス機10、上流側ロボット20及び下流側ロボット30の動作を制御するタンデムプレスライン100の制御方法。
(もっと読む)
金属シートの搬送方法
【課題】一定枚数のシート体を搬送する時間を短縮させることができ、生産性が優れる金属シートの搬送方法を提供すること。
【解決手段】本発明は、ブランキングプレス10で切断した金属シート2を、ランアウトコンベア20により搬送し、パイラーコンベア30の複数の電磁マグネットMが連続的に配設された磁着ベルト4に磁着させることにより引き渡し、その後、パイラーコンベア30により搬送し、積載部50の真上のパイリング位置3にて電磁マグネットMの磁力を失わせることにより落下させ、積載部50に順次積載させる金属シート2の搬送方法であって、ランアウトコンベア20及びパイラーコンベア30が間欠運動しており、隣合う前側の電磁マグネットM2と後側の電磁マグネットM1との境界に金属シート2が位置し、前側の電磁マグネットM2の磁力が失われた場合、該金属シート2の磁着可能な磁着面Rのうちの一部が後側の電磁マグネットM1に磁着されている金属シート2の搬送方法である。
(もっと読む)
ダイクッション装置
【課題】ダイクッション装置のクッション圧の応答性が優れると同時に、ダイクッション装置への衝撃を十分に緩和させることができるダイクッション装置を提供すること。
【解決手段】本発明は、プレス時の下方への加工圧に対抗してクッション圧を発揮するダイクッション装置100であって、クッションパッド11と、該クッションパッド11に設けられた油圧室16と、該油圧室16の壁面を摺動可能なピストン15bと、該ピストン15bに当接された支柱ロッド12と、該支柱ロッド12に設けられクッションパッド11を上方に付勢する上方付勢装置と、該上方付勢装置を駆動させるための駆動源と、を備え、油圧室16の容積が変動可能となっているダイクッション装置100である。
(もっと読む)
サーボプレスによる鋼板のホットプレス方法及びサーボプレス
【課題】スライドの下死点保持時にサーボモータに保持トルクがかからない、サーボプレスによる鋼板のホットプレス方法及びサーボプレスを提供する。
【解決手段】第1,2,3,4サーボモータ21a,21b,21c,21dによって駆動される第1,2,3,4スライド駆動機構22a,22b,22c,22dに第1,2,3,4コンロッド31a,31b,31c,31dを含み、第1,2,3,4コンロッド31a,31b,31c,31dの脚部33a,33b,33c,33dの下端側に第1,2,3,4スライド調整装置37a,37b,37c,37dが配置されているサーボプレス100による鋼板18のホットプレス方法であって、スライド12の下死点で、これらのコンロッドの脚部が垂直状態に所定時間t保持され、上型13と下型15で鋼板18が成形加工されるとともに焼き入れが行われるサーボプレス100による鋼板18のホットプレス方法。
(もっと読む)
ダイクッション装置
【課題】クッションパッドの上下移動を制御することにより、良質なプレス製品を製造することができ、且つコンパクトな構造とすることができるダイクッション装置を提供すること。
【解決手段】本発明は、ブランクの下方に設けられたクッションパッド10と、該クッションパッド10をエアー圧で支持するエアシリンダ20と、クッションパッド10の上下移動を制御する油圧シリンダ30と、該油圧シリンダ30内の油圧を調整可能な第1油圧調整装置31aと、を備えるダイクッション装置100において、油圧シリンダ30と第1油圧調整装置31aとの間に、油圧シリンダ30内の油圧を調整可能な第2油圧調整装置31bを備えるダイクッション装置100である。
(もっと読む)
板材の突き合わせ位置決め装置
【課題】板材の突き合わせ面同士を隙間なく突き合わせて位置決め固定でき、また板材を傷つけることがない板材の突き合わせ位置決め装置を提供する。
【解決手段】第1の板材W1を第1の電磁石製の吸着部材21と第1の磁性材製の押さえ部材41とで挟持して移動させ第1の板材W1の突き合わせ面を位置決め基準部材14に突き当てて位置決めし、第1のクランプ部材60を押し付けて固定する。位置決め基準部材14を退避させた後に、第2の板材W2を第2の電磁石製の吸着部材21’と第2の磁性材製の押さえ部材41’とで挟持して移動させ第2の板材W2の突き合わせ面を位置決め固定された第1の板材W1の突き合わせ面に突き当てて位置決めし、第2のクランプ部材60’を押し付けて固定する。第1,第2の電磁石製の吸着部材21,21’と第1,第2の磁性材製の押さえ部材41,41’はそれぞれその中心軸線のまわりに回転可能である。
(もっと読む)
1 - 10 / 57
[ Back to top ]