
澁谷工業株式会社により出願された特許
41 - 50 / 503
物品搬送装置
【課題】搬送コンベヤに所定間隔で設けられたキャリア保持手段からキャリアをリジェクトした場合に、そのキャリア保持手段にキャリアを補充する。
【解決手段】搬送コンベヤに等間隔で設けられたキャリア保持手段に、キャリア2を保持させて搬送する。容器供給ポジションAでこれらキャリア2に容器6を供給し、液体の充填およびキャッピングを行った後、検査ポジションDで検査を行う。不良容器が検出されたときには、次のリジェクトポジションEでこの容器6をキャリア2ごとリジェクトする。その後、キャリア補充ポジションFで、空になっているキャリア保持手段にキャリア2を補充する。すべてのキャリア保持手段がキャリア2を保持した状態で次の容器供給ポジションAに到達する。
(もっと読む)
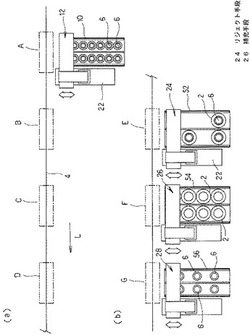
リーク検査装置

【課題】キャリア内に収容されて搬送される間に液体の充填およびキャッピングが行われた容器が、傷付きやピンホール等の欠陥があった場合に、キャリアごとリジェクトし、その位置に空のキャリアを補充する。
【解決手段】搬送コンベヤに等間隔で設けられたキャリア保持手段8に、キャリア2を保持させて搬送する。容器供給ポジションAでこれらキャリア2に空の容器6を供給し、液体の充填およびキャッピングを行った後、検査ポジションDで、キャリア2とヘッダー40とによって密閉空間42を形成して、この空間42内を真空ポンプ46で吸引し、圧力センサ48によって圧力を測定する。設定した圧力よりも高い圧力が検出されたときには、判定手段50が不良容器と判定して、リジェクトポジションEでキャリア2ごとリジェクトする。その後、補充ポジションFで空のキャリア2を補充する。
(もっと読む)
容器受け渡し方法および容器受け渡し装置
【課題】スクリュー2の螺旋状の溝内にシリンジ等の容器4を直立した状態に保持して搬送する。
【解決手段】等ピッチで螺旋状の溝が形成され、この溝内にシリンジ4を保持して搬送するスクリュー2と、スクリュー2の溝内に保持されているシリンジ4の側面をガイドする、上方の昇降ガイド30および下方の昇降ガイド32と、シリンジ4を保持して前記スクリュー2の溝内に供給する容器保持手段(ロボット8)と、スクリュー2により搬送されるシリンジ4に追従して移動しつつシリンジ4をガイドする追従ガイド52とを備えており、上下の昇降ガイド30、32を、シリンジ4をガイドしない退避位置に移動させて、容器保持手段8が保持しているシリンジ4をスクリュー2に供給し、この保持した状態のまま上下の昇降ガイド30、32をシリンジ4をガイドする位置に移動させる。
(もっと読む)
血液透析装置
【解決手段】 透析液回路4は、給液通路31に大気を導入するためのエア供給通路57を備えており、このエア供給通路57には電磁開閉弁V105が配置されるとともに、給液口31Aに近い給液通路31には電磁開閉弁V103が配置されている。
透析治療の終了後において、電磁開閉弁V103が閉鎖されるとともに電磁開閉弁V105が開放された状態において、エアポンプ22が作動されることにより、エア供給通路57から透析液回路4内に大気が導入されて所要時間通気される。
【効果】 透析液回路4内の液体を排液口32Aから排液して、透析液回路4内を乾燥させることができる。
(もっと読む)
エアコンベヤおよびエアコンベヤの制御方法
【課題】エアコンベヤ2によって搬送されている樹脂製容器6が、衝突等によって変形することを防止する。
【解決手段】エアコンベヤ2によって搬送されている樹脂製容器6に、搬送方向と逆側から胴部6cに向けてエアを噴射するエアノズル22を設けるとともに、その上流側に、連続して搬送されている樹脂製容器6の容器群の本数を検出するセンサ38、40が設けられている。このセンサ38、40からの信号により制御装置42がエアノズル22から噴射するエア圧力を制御する。容器群の本数が10本未満の時は、逆方向のエアの噴射は行わず、10本〜19本の時は、弱いエア噴射圧力で逆方向のエアを噴射し、20本に以上の時は、強いエア噴射圧力で逆方向のエアを噴射する。
(もっと読む)
振り分け装置
【課題】ワークの搬送経路上の振り分け位置に、品質等級に対応する複数の振り分け口を有する振り分け部材を移動可能に設け、ワークを振り分け位置にて複数の振り分け口に振り分けることを可能とし、品質等級数の増加に対応できる振り分け装置とする。更に、装置のタクトアップを図るとともに、小型化を図る。
【解決手段】品質等級を判定したワークを搬送して振り分ける装置4に次の手段を採用する。第1に、搬送経路上の振り分け位置P1・・・P10へのワークの搬送手段12と、振り分け位置P1・・・P10の搬送手段12上のワークを排出するワーク排出手段と、複数の振り分け口を有する振り分け部材16と、排出されたワークを振り分け口に案内する案内部材と、振り分け部材移動手段15とを備える。第2に、振り分け位置に搬送されたワークの品質等級に対応する振り分け口を案内部材出口に位置させ、振り分ける。
(もっと読む)
物品供給装置
【課題】幅の広い平面(第1の面)を上下にして搬送されてきた物品を、90度回転させて立てた状態で箱詰めするために供給する装置を提供する。
【解決手段】供給コンベヤ4によって、幅の広い面を上下にしてランダムな状態で搬送されてきた物品2を、ロボット10で方向を揃えて取り出し載置プレートに載せる。載置プレートを90度回転させて物品2を幅の狭い面(第2の面)が上下に来るように立ち上げ、各載置プレートの間隔を縮小して物品2を集積した後、製品コンベヤ16に追従して移動するプッシャによってこれら物品2を押し出して前記製品コンベヤ16の収容部14内に挿入する。
(もっと読む)
容器処理装置
【解決手段】 容器処理装置1は、各バケット12内に角型の容器2を収容して搬送する第1搬送コンベヤ3と、第1搬送コンベヤ3によって搬送される容器2を撮影するカメラ4と、制御手段7によって作動を制御されて、バケット12内の容器2を吸着して取り出すロボットハンド6Aとを備えている。
カメラ4が撮影した容器2の画像が制御手段7へ伝達されると、制御手段7は、容器2の画像上の中心位置を求め、そこからバケット12の中心12cへ所定量ずらした位置を上記ロボットハンド6Aによる容器2の吸着位置として決定する。ロボットハンド6Aは、バケット12内で傾斜している容器2の側面2Bの上記吸着位置を吸着してバケット12内から取り出す。
【効果】 角型の容器2であってもロボットハンド6Aによって確実に吸着して取り出すことができる。
(もっと読む)
無菌接続装置
【解決手段】 無菌接続装置4は、第1蓋体11を備えたアイソレータ2と第2蓋体21を備えたインキュベータ3との間に除染空間S1を形成する密封手段9と、供給管路41を介して除染媒体を上記除染空間S1へと供給する除染媒体供給手段10と、上記除染空間S1の除染媒体を排出する排出管路43とを備えている。
さらに、上記第1蓋体11と第2蓋体21とを連結してこれらの周囲に環状の除染空間S1に形成する蓋体接続手段8と、該環状の除染空間S1の内部に除染媒体の流通を妨げる遮蔽部材36を設けて、上記環状の除染空間S1を細長い管路状の除染空間S1に区画し、さらに上記細長い除染空間S1の両端部分に供給管路41を、それらの間に上記排出管路43を接続している。
【効果】 除染空間を蓋体を囲繞する小容量で環状の除染空間にすることで、効率的に除染することができる。
(もっと読む)
脆性材料の割断装置
【解決手段】 板状のガラスWを割断する加工ヘッド2は、ガラスWの上面の割断予定線S1上にスクライブ溝を形成するスクライブ溝形成手段7と、それよりも移動方向後方側に配置されて上記スクライブ溝よりも外方のスクラップ部分WSを押し下げる押し込み手段8とを備えている。この押し込み手段8は、移動方向に沿って配置された複数の押し込みローラ22を備えており、それらは順次移動方向の後方側に位置する程、徐々に高さが低くなっている。
【効果】 ガラスWの上面にスクライブ溝が形成された後に、スクラップ部分WSが複数の押し込みローラ22によって徐々に押し下げられるので、ガラスWを割断予定線S1に沿って無理なく割断することができる。
(もっと読む)
41 - 50 / 503
[ Back to top ]