
アリオテクノ株式会社により出願された特許
1 - 5 / 5
無人ワーク回収装置
Notice: Undefined index: from_cache in /mnt/www/gzt_applicant_list.php on line 189
微粒子検出装置及び微生物検出方法
【課題】細菌等の微生物を始めとした検体液中に含まれる種々の微粒子について、簡易に効率よく、確実に検出及び計数できる手段を提供する。
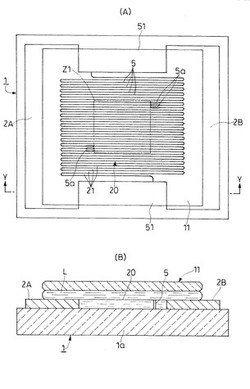
【解決手段】上面に相互に噛み合う櫛歯状パターン部20を有する一対の薄膜電極2A,2Bが形成された検出基板1と、両薄膜電極2A,2B間に交流電界を印加する誘電泳動制御ユニット3と、検出基板1上面の所定領域の拡大視野を得る光学顕微鏡4とを備える微粒子検出装置を用いる。検出基板1の上面に微粒子を含む検体液Lを展開させ、薄膜電極2,2間に交流電界を印加することにより、検体液L中の正の誘電泳動力による影響を受ける微粒子P…が電極間隙5に臨む電極縁部21a,21aに一端側を付着して整列集合し、この整列集合状態を前記光学顕微鏡4の拡大視野で捉える。
(もっと読む)
顕微鏡プレパラート作成キット

【課題】顕微鏡プレパラート作成キットとして、検体試料を顕微鏡観察に適した保持状態に容易に設定可能とし、プレパラート用空間を一定厚みとして観察位置の移動に伴うフォーカスずれを防止し、フォーカスの再調整のための煩雑な操作を排して観察能率を向上させ、検体の計数や濃度測定等の自動化における測定の信頼性を高め、検体試料を安定状態で長時間保持し得るものを提供する。
【解決手段】検体液Lを載せる検出基板1と、検出基板1上に配置して内側に検体試料を収容する平面視環形のシリコンゴムシート2と、シリコンゴムシート2上に配置して検体試料を覆う透明性カバー板3と、を備える。
(もっと読む)
関節装置、関節装置を用いたフィンガーユニット、及び、ユニバーサルロボットハンド
【課題】人の指のごとき微妙な動作を実現することが可能な関節装置、関節装置を用いたロボットフィンガー、及び、ユニバーサルロボットハンドを提供する。
【解決手段】一方のリンク部材Lに固定したフレクスプライン7と、その回転軸心Pと交差する方向に延出形成した薄肉部8aを他方のリンク部材Lに固定したサーキュラスプライン8とを備えてなるハーモニックドライブHを前記関節部材Jに組み込み、基端側リンク部材Lに収容したモータMの出力を基端側のウェーブジェネレータ6に伝達する第一の伝動機構T1と、前記モータMの出力を前記第一の伝動機構T1及び前記基端側リンク部材Lに隣接するリンク部材Lに収容した伝達シャフトSを介して前記基端側のウェーブジェネレータ6に隣接するウェーブジェネレータ6に伝達する第二の伝動機構T2を備える。
(もっと読む)
触覚センサ及び触覚センサの感度調節方法
【課題】 長期に亘り検出精度が低下することなく、高分解能であっても十分な感度で検出できる触覚センサを提供する。
【解決手段】 押圧により抵抗値が変化するシート状の感圧導電性部材3と、感圧導電性部材3の一側面に配置され、感圧導電性部材のインピーダンスを検出する電圧印加電極5と電圧検出電極6でなる電極セル7の複数がマトリクス状に配列された複層フレキシブル基板でなる電極シート2を備えて構成され、列方向に配列された複数の電圧印加電極5が列毎に相互に接続され、外部からの電圧を同時に印加する複数のリードパターン5aが電極セル7が設けられた第一基板2aに形成され、行方向に配列された複数の電圧検出電極6が行毎に相互に接続され、外部に検出電圧を出力する複数のリードパターン6aが第二基板2bに形成される。
(もっと読む)
1 - 5 / 5
[ Back to top ]