
株式会社アドヴィックスにより出願された特許
1,071 - 1,080 / 1,291
駐車支援制御装置および駐車支援制御システム
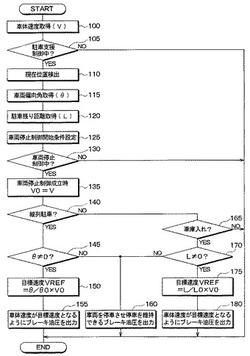
【課題】 駐車支援制御が行われる際に、ドライバが効率よく車両を所望の位置に停止させられるようにする。
【解決手段】 車両偏向角θの初期値θ0や距離Lの初期値L0を設定しておき、車両停止制御が開始されると、これら初期値θ0、L0に対する車両偏向角θもしくは距離Lの比から正規化された係数Rを求め、この係数Rにて車体速度VLの目標速度VREFを求める。これにより、車両VLが目標駐車位置に到達したときに、車両VLの車体速度Vが非常に小さくなっているため、目標駐車位置に車両VLを精度良く停止させることが可能となる。
(もっと読む)
車両用ブレーキ制御装置

【課題】 液圧制動力等の摩擦制動力と回生制動力とを併用した回生協調ブレーキ制御を行う場合において、電気エネルギーの高い回収効率を得るとともに、回生制動力に起因する駆動輪のロックの発生を抑制すること。
【解決手段】 この車両用ブレーキ装置では、通常、回生制動力FEの上限値FE1を現在発生可能な回生制動力の最大値FEmaxに設定する。前輪駆動車両の場合、前輪制動力(前輪液圧制動力FBf+回生制動力FE)と後輪制動力(後輪液圧制動力FBr)の和である全制動力(=FE+FBf+FBr)がブレーキペダル踏力Fpに応じた目標制動力FTと一致するように、且つ回生制動力FEが上限値FE1以下の可及的に大きい値になるように設定される。この結果、回生制動力FEが前輪側目標配分制動力FT・Kdよりも大きくなり得る(直線p,q)。駆動輪(前輪)のロック傾向が発生し易くなるほど上限値FE1が最大値FEmaxから小さくされる。
(もっと読む)
マルチチップセンサ
【課題】 ECU基板に直接取り付けられるECU基板取付面を有するパッケージの中に、エレメントチップと信号処理ICチップとが少なくとも収容され、エレメントチップの平面がECU基板取付面に対して垂直になるマルチチップセンサにおいて、マルチチップセンサのECU基板取付面からの高さ(H)を小さくすること。
【解決手段】 このマルチチップセンサは、センサの検出エレメントを備えたエレメントチップ30と、検出エレメントの出力信号を処理する信号処理ICを備えた信号処理ICチップ40と、少なくともエレメントチップ30と信号処理ICチップ40とを収容するとともにECU基板取付面を有するパッケージ50とを備える。エレメントチップ30の平面とECU基板取付面とが垂直とされる一方、エレメントチップ30よりも大きい信号処理ICチップ40の平面とECU基板取付面とが平行とされる。
(もっと読む)
制動制御装置
【課題】 制動制御装置のON−OFFを変更した場合などであっても、急激な加減速が車両に生じないようにし、もってドライバに与える違和感を小さくすることができる制動制御装置を提供する。
【解決手段】 制動制御装置1は、TRC制御手段11およびTRC制御中止手段12を備えている。TRC制御中止手段12は、操作スイッチ3の操作に応じて、TRC制御中止状態またはTRC制御実行状態とする。TRC制御手段11は、TRC制御中止状態とTRC制御実行状態とを移行する際、目標スリップ率を徐々に変化させる。
(もっと読む)
二輪車用ディスクブレーキのキャリパ取付構造
【課題】 制動時にキャリパがフォークに対して傾くことを強く抑制し得るキャリパ取付構造を提供する。
【解決手段】 キャリパ2は、フォーク本体5a側からディスクロータ6を越えてホイール12側に延出するキャリパ本体2aと、ディスクロータ6よりもフォーク本体5a側の位置に形成されたキャリパ外側取付部2b,2cと、ディスクロータ6よりもホイール12側の位置に形成されたキャリパ内側取付部2dを一体に有している。フォーク5は、ディスクロータ6よりもフォーク本体5a側にてキャリパ外側取付部2b,2cが取付けられるフォーク外側取付部5b,5cと、フォーク本体5aからディスクロータ6を越えてホイール12側に延出しその先端部にキャリパ内側取付部2dが取付けられるフォーク内側取付部5dを有している。
(もっと読む)
車両挙動制御装置
【課題】 非グリップ状態検出条件を最適に設定することで、適切な横滑り状態抑制制御を実現すること。
【解決手段】 車両の好ましくない横滑り状態を抑制すべく横滑り状態抑制制御を行う車両挙動制御装置10において、車両状態量を換算して横加速度換算値を演算する横加速度換算値演算手段90,92と、実横加速度を検出する実横加速度検出手段36と、路面に対する車両の非グリップ状態を検出し、非グリップ状態が検出された場合に前記横滑り状態抑制制御の実行禁止状態から実行許可状態への切り替えを行う非グリップ状態検出手段94とを備え、前記非グリップ状態は、前記各手段から得られる横加速度換算値及び実横加速度が同一の車両旋回方向を表す正負の符号であり、且つ、横加速度換算値及び実横加速度の大きさがそれぞれの閾値より大きい場合を一条件として検出されることを特徴とする。
(もっと読む)
車両の制動制御装置、及び車両の制動制御方法
【課題】アンチロックブレーキ制御が行われた場合において、車両に制動力が付与されてから車両が停止するまでの距離を良好に短縮させることができる車両制動制御装置及び車両の制動制御方法を提供する。
【解決手段】車両制動時に、車両の車体減速度が車体減速度閾値以上であった場合、CPUは、高G制動であると判断し、前輪のスリップ率が第2のスリップ率閾値以上であって且つ第1のスリップ率閾値未満となるように前輪の制動力の保持及び増加を繰り返し実行する。そして、前輪のスリップ率が制御開始スリップ率閾値以上であって且つ車両の車体減速度が車輪減速度閾値よりも高い値となった場合には、CPUは、アンチロックブレーキ制御を開始させる。すなわち、CPUは、前輪の接地荷重を最大限増加させることにより、車両の制動力を増加させた状態としてからアンチロックブレーキ制御を開始する。
(もっと読む)
路面状態判定装置
【課題】 車速が極低速度の場合や車輪速度センサからセンサリングまでの距離が所定間隔以上に空いた場合に、路面状態を誤判定してしまわない路面状態検出装置を提供する。
【解決手段】 車輪速度の変動幅がしきい値以下である場合にのみ、正しく車輪速度を検出することが可能であるとして、そのときの速度域を記憶しておき、その速度域に車輪速度が達したときに初めて路面状態判定を行う。このようにすれば、統合ECUで正確な車輪速度演算が行える場合にのみ、正しい車輪速度に基づいて路面状態判定が行われる。したがって、統合ECUで路面状態が良路であるにもかかわらず悪路であると誤判定してしまうことを防止できる。これにより、車速が極低速度の場合や車輪速度センサからセンサリングまでの距離が所定間隔以上に空いた場合に、路面状態を誤判定してしまわない路面状態検出装置とすることができる。
(もっと読む)
車両の制動制御装置
【課題】 ホイールシリンダ圧を制御するときの圧力変動を小さくして、ノイズを抑制する。
【解決手段】 車両の制動制御装置10は、マスタシリンダ圧を検出するマスタシリンダ圧検出手段13と、ホイールシリンダ圧の目標値を演算するホイールシリンダ圧目標値演算手段62と、マスタシリンダ圧の検出値とホイールシリンダ圧の目標値との差分を差圧指示値として演算する制御手段66と、差圧指示値に応じて絞り開度を調節することでホイールシリンダ圧を制御する差圧制御弁28FL〜28RRと、を備える。
(もっと読む)
オープントップ型のキャリパを備える対向型ディスクブレーキ
【課題】 制動時の初期の段階でパッドが傾くことを防止し得るオープントップ型のキャリパを備える対向型ディスクブレーキを提供する。
【解決手段】 パッド6をディスクロータ径方向外方からキャリパ3の開口部3dを通してキャリパ3内に挿入できる対向型ディスクブレーキ1であって、キャリパ3とパッド6の間には、パッド6をロータ径方向中心側から外方に付勢する付勢部材8,9が設けられている。キャリパ3には、パッド6のロータ径方向外側に位置する外側外周縁と摺動可能に面接する剛体な面接片2d,2eが締結されており、パッド6が面接片2d,2eによって開口部3dへ変位することが防止され、かつ面接片2d,2eに対して摺動してロータ軸方向とロータ周方向に移動できる構成になっている。
(もっと読む)
1,071 - 1,080 / 1,291
[ Back to top ]