
アシスト テクノロジーズ ジャパン株式会社により出願された特許
71 - 80 / 146
搬送システム、搬送車装置、並びに自動清掃装置及び方法
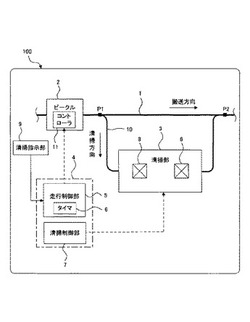
【課題】例えば半導体装置製造用の各種基板などを搬送する搬送車が、クリーンルーム内を走行する搬送システムにおいて、走行レールをビークル等の搬送車が走行する際に発生する塵を、確実に或いは効率的に清掃するようにする。
【解決手段】搬送システム(100)は、クリーンルーム内に敷かれた走行レール(1)と、走行レールを走行可能であり、被搬送物を搬送するためのビークル(2)と、走行レールの所定箇所に設けられ、ビークルを清掃するための清掃部(3)と、定期又は不定期に、ビークルが清掃部を走行するように、ビークルを制御する走行制御部(5)とを備える。
(もっと読む)
無人搬送車

【課題】床面上を所定の走行ルートに従って走行する従来の無軌道型の無人搬送車では,磁気テープなどを用いて誘導を行っていたため,磁気の広がりなどによって走行制御の精度に限界があった。
【解決手段】走行ルートに沿って連設された光学的マークを撮像するための撮像手段と,各光学的マークと,基準となる光学的マークとの位置関係を確認すると共に,最新の画像に含まれる上記位置関係が確認された光学的マークの当該画像上の位置に基づいて,現在の車体の走行位置を検出する走行位置検出手段と,上記基準となる光学的マークに対して位置関係が定められた光学的マークのうち,少なくとも上記所定の走行ルートに沿った光学的マークに対して設定された教示走行位置と,上記走行位置検出手段により検出された現在の車体の走行位置とに基づいて,車体の走行制御を行う無人搬送車。
(もっと読む)
搬送台車、停止位置判定方法およびプログラム
【課題】搬送システムが多数の装置を含んでいても、装置の設置位置変更を行なったときの搬送システムの立上げ、搬送システムの変更時に要する工数および時間を抑制できること
【解決手段】軌道を走行して停止し、被搬送物を支給する、または被搬送物を引き取るOHT搬送台車1において、基準画像記憶部は基準画像を記憶する。バーコード検出部33は、レール10に付されたバーコード25を検出する。走行距離測定部は、バーコード25からの走行距離を測定する。走行指示部は、走行距離が予め決められた距離となったときに、当該OHT搬送台車1を停止させる。CCDカメラ2は、OHT搬送台車1が停止したときに、レール10を含む画像を撮像する。停止位置判定部は、基準画像記憶部から読み出した基準画像とCCDカメラ2が撮像した画像とを比較し、これらの差異が基準値の範囲内であれば、目標停止位置に停止したと判定する。
(もっと読む)
天井走行搬送装置
【課題】気流の影響によらず、容易に搬送物を載置位置に載置する。
【解決手段】走行機構17がレール11に沿ってポート43上に移動する。昇降機構13が懸垂ベルト14を繰り出すことによって、FOUP21が降下する。距離センサ31が降下距離を測定し、FOUP21が位置決めピン23近傍まで降下したと判断した場合、風向風速センサ25が水平方向に関する風向及び流速を測定し、重量センサ30がFOUP21の重量を測定する。次に、ズレ量記憶部が参照されて位置ズレ量が推定され、この位置ズレ量に基づいて、水平移動機構12によって昇降機構13が水平方向に移動する。そして、再度昇降機構13が懸垂ベルト14を繰り出すことによって、FOUP21は降下して、FOUP21の位置決めピン23と位置決め穴とが重ね合う。
(もっと読む)
ストッカ及びスタッカ装置の制御方法
【課題】収納能力を高める。
【解決手段】一方向に伸延する保管棚2において、その伸延方向に直交する方向に沿って、保管物9が載置される載置領域を2つ設ける。保管物9は、その下面における保管棚2の伸延方向両側を支持された状態で保管棚2に載置される。保管棚2とポート3との間で保管物9の移載を行うスタッカ装置4は、保管棚2の伸延方向と直交する方向に沿って進退可能なハンド47を有している。載置された保管物9の下面と当接するハンド47の当接面の進退方向に沿う長さは、保管棚2においてハンド47の進退方向に沿って設けられる2つの載置領域に跨る長さ以上である。ハンド47は、当接面が当該2つの載置領域のうち、スタッカ装置4側に位置する載置領域と鉛直方向に重なる位置まで前進する状態と、当該2つの載置領域の両方と鉛直方向に重なる位置まで前進する状態とを取り得る。
(もっと読む)
ストッカ
【課題】コンベアを停止させることなくFOUPを移送する。
【解決手段】このストッカ1は、製造過程にあるFOUP2を搬送するコンベア3に隣接して配置される。このストッカ1は、コンベア3上を移動するFOUP2を摘出し、且つ、コンベア3上にFOUP2を載置するピックアップロボット40と、FOUP2の搬入用及び搬出用のポート30と、FOUP2を保管する棚10a及び10bと、ポート30に載置されるFOUP2を棚10a又は10bに移送し、且つ、棚10a又は10bに保管されるFOUP2をポート30に移送するスタッカクレーン20とを備えている。
(もっと読む)
被搬送物の保管装置
【課題】一時的に棚部を退避させる場合であっても再設置後の被搬送物の載置位置のティーチング作業を必要としない。
【解決手段】被搬送物が所定の載置位置に載置される棚部30と、軌道や天井に上端が支持された支柱10とを有している。棚部は支柱10の下端に支持されている。支柱10は、上支柱11と下支柱12とからなり、上支柱11が前記軌道又は天井に支持された状態で下支柱12を上支柱11から分離できるように、上支柱11と下支柱12とが接続されている。
(もっと読む)
コンテナの搬送システム及び測定用コンテナ
【課題】コストを低減し、省スペースを実現する。
【解決手段】ストック1は、収納用フープ20と複数のパージユニット50と測定用フープ30とスタッカクレーン60とを備えている。収納用フープ20は、内部に半導体ウェハを収納している。測定用フープ30は、内部に流量計を備えている。パージユニット50は、収納用フープ20が載置される複数のパージ台からなるパージ棚51を備えており、パージ台上に載置された収納用フープ20内に窒素ガスを供給する。スタッカクレーン60は、パージ台へ収納用コンテナ20を搬送するとともに、複数のパージ台同士の間で測定用フープ30を搬送する。
(もっと読む)
位置決めピンの固定方法及びピン固定台
【課題】搬送装置に搬送物を搬送させる前の準備作業である位置合わせを多大な時間をかけることなく簡易に行う。
【解決手段】フープを把持する把持機構にフープを介してマーカーを固定する(S1)。ここでマーカーは、先端のインク付着部が下方に位置し、フープの下面に形成された位置決め穴と水平方向に関して所定の位置関係を有するように固定される。次に、把持機構を下降させ、フープの載置台上にマーカーで位置合わせマークを形成する(S5)。そして、位置決め穴に対応する位置決めピンが固定されたテーブルを、位置決めピンが位置合わせマークに対して上記所定の位置関係を有するように、載置台上に固定する(S6)。
(もっと読む)
天井走行搬送装置
【課題】搬送台車の走行方向前方にある障害物の検知、及び搬送台車の下方にある障害物の検知を低コストで実現する。
【解決手段】搬送台車20に、搬送台車20の走行方向前方に位置する前方監視領域及び下方に位置する下方監視領域を含む領域をスキャニングすることができるセンサ30を設ける。そして、選択部は、搬送台車20が走行している際には、センサ30によるスキャニング領域のうち前方監視領域を選択し、搬送台車20が搬送物であるFOUP80の回収作業又は載置作業を行っている際には、下方監視領域を選択する。監視部は、選択部によって選択された監視領域内の障害物を監視する。
(もっと読む)
71 - 80 / 146
[ Back to top ]