
アシスト テクノロジーズ ジャパン株式会社により出願された特許
81 - 90 / 146
有軌道搬送装置
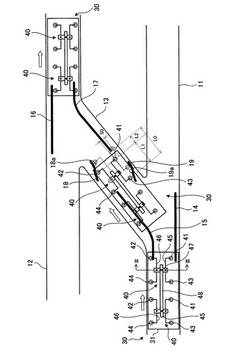
【課題】2つの軌道を接続する接続軌道を短くする。
【解決手段】接続軌道13には、その幅方向他方側(図2中左方)に設けられており、その伸延方向に延びる方向制御ガイド15と、その幅方向一方側(図2中右方)に設けられており、その伸延方向に関して方向制御ガイド15と離隔領域を隔てて離隔していると共に、その伸延方向に沿って延びる方向制御ガイド17とが設けられている。搬送台車30が順方向(図2中矢印で示す方向)に走行する際において、走行ユニット40が有するガイドローラ42、44の方向制御ガイド15による案内が解除された後に、当該走行ユニット40のガイドローラ41が、方向制御ガイド17に案内される位置まで当該走行ユニット40をシフトさせるシフト動作を行う。係るシフト動作の最中に、ガイドローラ42と当接する当接面18aを有する順シフトガイド18を設ける。
(もっと読む)
物品搬送システム

【課題】処理装置からの処理済み物品の引取、ならびに処理装置への未処理物品の支給を行う時間を極力短縮化することによって、半導体処理装置などの遊休時間を短縮し処理効率の向上を図った物品搬送システムを提供することである。
【解決手段】複数の搬送台車13、ストッカ14、走行路、及び処理済み物品引取制御手段と未処理物品支給制御手段とから構成される搬送台車制御手段26を備え、上記処理済み物品引取制御手段は、処理装置15から物品の処理が終了するまでの予測時間を受信する予測時間受信手段と、当該予測時間が所定時間に達したら、物品の搬送が可能な搬送台車13のうち、処理装置15に最も早く到着する一の搬送台車13を、キャリア20の引取を行う引取台車に指定する引取台車指定を行う引取台車選定手段とを有し、上記引取台車に、キャリア20の引取処理を指令することを特徴とする物品搬送システム。
(もっと読む)
搬送台車及び搬送台車による被搬送物移送方法
【課題】カセットとカセット収納棚との間に滑り磨耗が発生するのを防止する。
【解決手段】この搬送台車1の台座11に取り付けられる車輪14の近傍には、油圧ジャッキ30a及び30bが設けられている。この油圧ジャッキ30a及び30bは、カセット棚装置4側に配置される一対の前方ジャッキ30aと、一対の前方ジャッキ30aのカセット棚装置4の反対側に配置される一対の後方ジャッキ30bとから構成されている。そして、一対の前方ジャッキ30a及び一対の後方ジャッキ30bをジャッキ制御部により制御することによって、前方ジャッキ30aを後方ジャッキ30bより高位置に保持して、車体部10を傾斜させる。
(もっと読む)
搬送システム
【課題】被搬送物を移載するための機構が設けられていない中継バッファを介して、その上面に被搬送物を載置して軌道上を走行する台車と、その下端において被搬送物を把持し、軌道に懸垂された状態で走行する台車との間で、被搬送物の受け渡しを行う
【解決手段】グリッパ47によりFOUP35を把持したOHT搬送台車16は、中継バッファ5に対向する位置において昇降ベルト46によりグリッパ47を降下させ、棚板21a、21bの上面に跨るようにFOUP35を載置する。OHS搬送台車8は、中継バッファ5に対向する位置において昇降テーブル64を上昇させて棚板21a、21bの間を通過させることによってその上面にFOUP35を載置し、その後、中継バッファ5に対向しない位置まで移動させてから昇降テーブル64を降下させることにより、FOUP35をFOUP載置台60に載置する。
(もっと読む)
被搬送物保管システム
【課題】搬送台車の停止位置補正教示工数を極限まで削減することができる被搬送物保管システムを提供する。
【解決手段】天井に敷設されたレール520a〜520fに沿ってOHT搬送台車300がFOUPを把持して走行する。レール520a〜520f下方に被搬送物保管棚200が設けられる。レール520a〜520fに複数のマスターバーコードが所定の間隔で貼着される。被搬送物保管棚200には、複数のキネマティックピンを有する位置決めプレートが複数枚配設され当該個々の位置決めプレートが所定の間隔で貼着された個々のマスターバーコードとの間で相対的に配置される。一の位置決めプレートの座標と、相対的に配置された一のマスターバーコードに基づいて停止したOHT搬送台車300のグリッパの座標との誤差量が補正装置に記録され、制御手段が他の被搬送物保管棚またはマスターバーコードに展開する。
(もっと読む)
保管棚システム
【課題】保管棚および移送手段から保管容器が落下するのを確実に防止する。
【解決手段】保管棚システム1は、次工程の処理を受けるために待ち時間が生じたシリコンウエハを収納したFOUP10を入出庫させるシステムである。そして、スタッカロボット22によりFOUP10が保管棚21に入庫される場合には、保管棚21の外周キネマティックピン21aは、FOUP10の外周ピン窪み11dに侵入することにより、スタッカロボット22の内周キネマティックピン23aとFOUP10のロック爪16との係合を解除するとともに当該係合が解除されたロック爪16に係合する。また、スタッカロボット22によりFOUP10が保管棚21から出庫される場合にはスタッカロボット22の内周キネマティックピン23aは、FOUP10の内周ピン窪み11eに侵入することにより、保管棚21の外周キネマティックピン21aとFOUP10のロック爪16との係合を解除するとともに当該係合が解除されたロック爪16に係合する。
(もっと読む)
一時保管棚装置
【課題】天井付近に敷設された軌道を走行して収納容器を搬送するOHTにおいて用いられる収納容器を一時的に保管する一時保管棚装置であって、収納容器の識別情報の目視確認や、保管棚からの収納容器の摘出を容易に実行できる一時保管棚装置を提供する。
【解決手段】天井付近に敷設された軌道に沿って走行する懸垂式昇降搬送装置により搬送される被搬送物を一時的に保管し、軌道に沿った位置に設置される一時保管棚装置であって、被搬送物を載置する棚手段と、被搬送物を載置した状態で棚手段を昇降させる昇降手段と、を有する。
(もっと読む)
物品収納装置
【課題】物品の収納能力を増強させつつ、搬送台車による搬送時間を少なくする。
【解決手段】収納空間1には、互いに平行に4つの収納棚23が配列され、隣接する収納棚23の間にレール25が敷設されている。移載ロボット24は収納棚23及び収納ポート32との間でキャリア18の受け渡しを行うとともに、レール25に沿って移動して収納棚23と収納ポート32との間でキャリア18を搬送する。昇降台6は収納ポート32及び搬入出ポート26との間でキャリア18の受け渡しを行うとともに、天井5を貫通して鉛直方向に移動して収納ポート32と搬入出ポート26との間でキャリア18を搬送する。OHT搬送台車17は、搬入出ポート26及び半導体製造装置との間でキャリア18の受け渡しを行うとともに、工程内軌道13に沿って移動して搬入出ポート26と半導体製造装置との間でキャリア18を搬送する。
(もっと読む)
作業用足場構造及び物品収納棚
【課題】簡易かつ安価な構成により収納効率を向上させることができ、タイプを問わずに適用することができる作業用足場及び物品収納棚を提供すること。
【解決手段】所定のスペースを挟んで互いに対向配置される一対の収納部2を有する物品収納棚1に設けられる作業用足場構造20であって、前記一対の収納部2の対向する側にそれぞれ設けられ、前記スペースを挟んで水平方向に平行に延びて対をなすレール21と、前記レール21を走行可能な複数の足場部材22と、前記スペースの開放端26の外部近傍に設けられ、前記複数の足場部材22を収容する収容部30とを備えることを特徴とする。
(もっと読む)
収納棚及び収納方法
【課題】パーティクル等を発生させることなく被搬送物を収納装置に収納する。
【解決手段】カセットを水平移動させる移送装置と、カセットを昇降させる荷台とを備えた搬出入装置によりカセットを搬入出可能に保管する棚ユニットにおいて、搬出入装置により載置位置の上方まで水平移動された後に下降されることによって、載置位置にカセットが載置される桟と、カセットを桟に下降して載置する際に、最初に当接する部分に設けられる、水平移動方向に移動自在なスライド部材20とを備えている。
(もっと読む)
81 - 90 / 146
[ Back to top ]