
バレオ・シャルター・ウント・ゼンゾーレン・ゲーエムベーハーにより出願された特許
1 - 10 / 18
自動車両のレーダ方法および自動車両用のレーダ装置
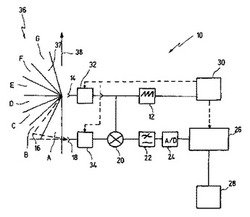
【解決手段】自動車両のレーダ装置(10)がレーダ波を放射して受信し、物体(16)と自動車両との距離が、発信されたレーダ波と受信されたレーダ波との間の周波数シフトから確定され、物体の速度が、受信されたレーダ波の位相位置から確定される、FMCWのレーダ方法が示される。方法は、この方法が、第1の時間区間(T_A、T_B)で、自動車両の周囲(36)の少なくとも1つの第1の部分区域(A,B)にある物体に対して実行され、第2の時間区間(T_C、T_D、T_E、T_F、T_G)で、周囲(36)の少なくとも1つの第2の部分区域(C、
D、E、F、G)にある物体に関して速度ではなく、距離が確定されることを特徴とする。
(もっと読む)
超音波センサを使用する駐車スペースの奥行き限度を確定する方法およびこの方法を実行するための装置

【解決手段】この発明は、車両の少なくとも1つの超音波車両センサを使用する駐車スペースの奥行き限度を確定する方法に関する。この方法では、車両が駐車スペースを長手方向に通過する際に、以下のステップ、すなわち、
a)超音波を発信すること、
b)発信された超音波の反響信号を測定ウィンドウ内で集めること、
c)反響信号の分散、および/またはこの分散内での反響信号の分布を決定すること、
d)分布内での集中を形成する全ての、および/または複数の反響信号の分散幅が、所定のしきい値より小さい場合に、奥行き限度を確定すること、が実行される。
(もっと読む)
目標物体との距離を確定するための方法および装置
【課題】この発明は、目標物体(200)との距離(R)を確定するための方法に関する。
【解決手段】この方法では、電磁波を送信信号(120a)の形態で送信器(111a)によって送信し、目標物体(200)で反射された送信信号(120a)の少なくとも一部分を、受信信号(120c,120d)の形態で受信器(111b)によって受信し、受信信号(120c,120d)の評価を基準信号(120b)に従って行なう。この基準信号(120b)は、送信信号(120a)に対する周知の位相差および送信信号(120a)と同一の周波数を有する。基準信号(120b)および受信信号(120c,120d)の周波数を、分周器(113)で、基準信号(120b)と受信信号(120c,120d)との間に存在する位相差を維持しつつ、同じ事前設定可能な分周率xだけ減少して、減少された周波数を有する基準信号(120b´)および減少された周波数を有する受信信号(120d´)を得ること、および減少された周波数を有する基準信号(120b´)と、減少された周波数を有する受信信号(120d´)との間の位相差を評価して、距離(R)を確定する。
(もっと読む)
車両の距離測定システムの距離測定データを評価するための方法および装置
本発明は、車両の距離測定装置の距離測定データを評価する方法に関する。車両の、観察される周囲環境のカメラ画像(100)を得て、距離測定装置によって、観察される同じ周囲環境から、距離測定データを得る。カメラ画像(100)を表示装置に表示し、距離測定データに従って、距離情報(1a´,1b´,2´)をカメラ画像(100)に統合する。本発明によれば、車両の経路(4a,4b)を確定し、場合に応じて、カメラ画像(100)に統合する。 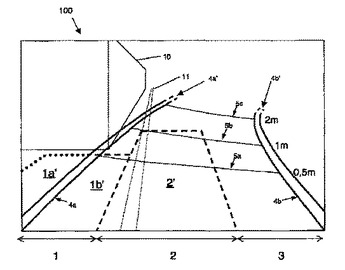 (もっと読む)
(もっと読む)
車線認識装置および方法
【解決手段】この発明は、車両用の車線認識装置に関し、この車両の前方にある車道マークを検出するためのカメラと、このカメラによって検出したデータを評価するための評価ユニットとを有する。この発明は、周知のタイプの車道マークの形状データが評価ユニットに記憶されていることと、この評価ユニットは、検出された車道マークと前記記憶された車道マークとの比較によって、検出された車道マークのタイプを確定することと、前記評価ユニットは、前記カメラによって検出された周知の車道マークの形状データから、およびこの車道マークの検出された経時変化から、車両速度を確定することとを特徴とする。さらに、この発明は、車線認識装置を操作する方法に関する。 (もっと読む)
霧状の媒体を検出するセンサ
【課題】
【解決手段】本発明は、霧状の媒体を検出するセンサ(10)であって、少なくとも2つの送信機(18,20)及び少なくとも1つの受信機(22)と、評価ユニット(32)とを具備し、送信軸(28,30)が、受信軸(32)と、2つの異なった位置(P1,P2)で交差し、評価ユニットは、受信機(22)が、2つの送信機(18,20)によって送信される信号を受信するときに、媒体を検出してなるセンサに関する。 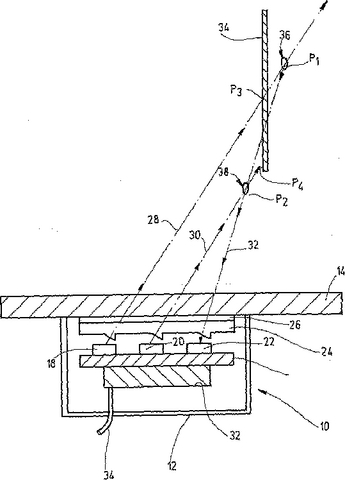 (もっと読む)
(もっと読む)
車両用の駐車補助手段および駐車補助方法
【解決手段】この発明は、信号を送信および/または受信する少なくとも1つのセンサ(12)と、この送信され、および/または受信された信号を処理する評価ユニット(18)とを有する駐車補助手段(10)および対応する駐車補助方法に関する。
この独創的な駐車補助手段は、偏向手段(22)が、送信され、および/または受信された信号に従って、前記センサ(12)および/またはこのセンサ(12)の放射方向(16)を旋回するように、特徴づけられている。
(もっと読む)
ロータとステータとの間で電気信号を伝送するための伝送装置
【課題】本発明はロータ(12)とステータ(14)との間で電気信号を伝送するための伝送装置(10)に関し、ロータ(12)およびステータ(14)によって形成された環状の中間空間(16)を具備し、この中間空間(16)は、ロータ(12)とステータ(14)との間に延びておりかつ中間空間(16)内で巻取可能または繰り出し可能である少なくとも1つのフラットベルトケーブル(22)を収容し、このフラットベルトケーブル(22)を中間空間において支持するために、弾性的に可撓性のある少なくとも1つの環状ベルト(32)が設けられている。
【解決手段】環状ベルト(32)は、複数の環状ベルト側の係合部分(34)を介して、ロータ(12)および/またはステータ(14)によって駆動されることができる。 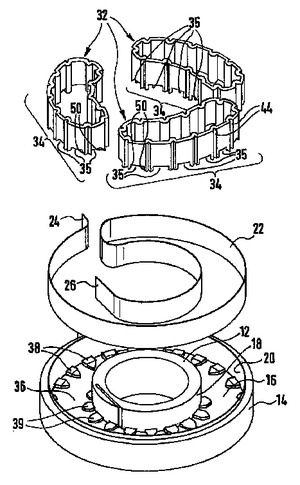 (もっと読む)
(もっと読む)
カメラの画像を図形的に処理するための方法および警告装置
【課題】この発明は、自動車両の周辺の、カメラ手段によって提供された画像を、図形的に処理する方法に関する。
【解決手段】その画像は、周辺にある障害物から生じる、自動車両に対する危険性が、ドライバーによって光学的に視覚化され、またはドライバーのために強調されるように、処理される。この発明によれば、カメラ手段によって提供された画像は、ドライバーのために一層明瞭に危険性を強調するために、画像における障害物の位置を考慮して処理される。この目的のために、自動車両の周辺における障害物の実際の位置は、はじめに決定される。続いて、周辺における障害物の実際の位置に対応する、画像における障害物の位置が決定される。
(もっと読む)
カメラ装置、特に、車両の周辺検知システムのためのカメラ装置
【課題】この発明は、カメラ装置に関し、特に車両の周辺検知システムのためのカメラ装置に関する。
【解決手段】このカメラ装置は、光学系保持体を支持するための支持フレームを有し、この光学系は、入射光を画像センサに導くものである。この発明における前記支持フレームは、光学系保持体の接触面のための支承面を有し、画像センサの平面に対し実質的に平行に広がること、および、その光学系保持体は、支承面の平面に整列する位置に配置され、かつ、目標位置で恒常的に固定可能であることを特徴とする。
(もっと読む)
1 - 10 / 18
[ Back to top ]