
国立大学法人東京工業大学により出願された特許
1,091 - 1,100 / 1,821
指装着型入力デバイスとプログラム
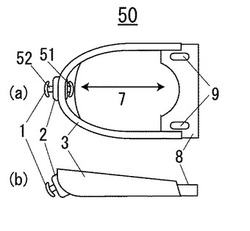
【課題】 指の自由度を束縛しないように指に装着するデバイスを用いてタッチパネルの接触位置検出機能を多用途・多機能に利用することを可能とする。
【解決手段】 タッチパネルとの接触に関する情報を、指の触覚にフィードバックする仕組みを供えた接触部を指の自由度を束縛しないように配置したフレームで支持して指に装着することで、操作者に束縛感を与えずに接触位置情報を明瞭に把握しながら座標情報を正確、快適に入力することを可能とした。
(もっと読む)
触覚刺激提示方法

【課題】 マウスやコンテンツビューアを保持する複数の指の触覚を刺激する振動生成器を指別に導入して、GUIの基本操作であるスクロール、カーソル、フォーカス移動を実行する際に触覚情報を手掛かりとして利用できるようにすること。
【解決手段】 マウスやコンテンツビューアを保持する複数の指が接触するデバイス側面に、触覚を刺激する振動生成器を指別に導入して、振動パルスを各指に別個に与え、それらの振動パルス間の時間差を制御することにより、指にぶつかる物体の運動を錯覚させる。この錯覚を通じてGUIの基本操作であるスクロール、カーソル、フォーカス移動の移動量や移動速度、移動方向を把握できるようにすることによって、表示システムの操作を支援する。
(もっと読む)
画像表示装置のための酔い防止装置
【課題】中心視野の視覚認識機能を妨げずに周辺視野を用いて酔いを防止した画像表示装置のための酔い防止装置を提供する。
【解決手段】画像表示装置のための酔い防止装置は、世界座標取得部10と視標生成部20と視標表示部30とからなる。世界座標取得部10は、加速度センサ及び/又はジャイロスコープ等を用いて世界座標情報を得るものである。視標表示部30は観察者の周辺視野の位置に配置されるものである。視標生成部20は、視標表示部30に表示する視標を生成するものであり、世界座標取得部10により得られる世界座標情報に応じて世界座標に位置が固定されているように見える視標を生成する。生成される視標を視標表示部30に表示することで、観察者の周辺視野に世界座標情報に対応した視標の刺激を与える。
(もっと読む)
振動低減装置のコントローラの設計方法、振動低減装置のコントローラ及び振動低減装置
【課題】騒音抑制や速応性などに関する制御性能およびロバスト安定性の両面を考慮して複数の周波数帯域の振動の低減をそれぞれ対応して制御する複数のコントローラの設計方法等を提供することにある。
【解決手段】複数のコントローラのうち1つのコントローラについて、1つのコントローラを除く他の1以上のコントローラでフィードバックした状態で1つのコントローラの制御対象からモデル誤差を求め、当該モデル誤差を用いてロバスト安定性を満たす重み関数を求めて1つのコントローラを設計する。これにより、周波数帯域を分割して各帯域のモデルを低次元で同定することができ、モデル化のための計算時間の短縮、モデル化精度の向上を達成することができる。各帯域用コントローラは、それぞれの帯域に対応した低次元モデルから設計されるため、制御系設計の高効率化を図ることができると同時に設計されるコントローラも低次元で構成することができる。
(もっと読む)
新規含硫黄エチレン性不飽和基含有化合物、放射線硬化性組成物及び硬化物
【課題】高い屈折率と高いアッベ数とを有することのできる硬化物を与える放射線硬化性組成物を提供する。
【解決手段】下記式(1)で示される含硫黄化合物と、エチレン性不飽和基を有する化合物とを反応させることにより得られる含硫黄エチレン性不飽和基含有化合物;それを含有する放射線硬化性組成物;及び硬化物。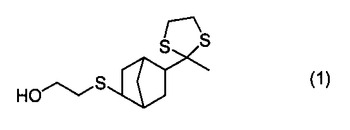 (もっと読む)
(もっと読む)
脚式移動ロボット
【課題】カメラの撮像画像による床面の形状を認識するための演算処理を軽減しつつ、ロボットの適切な移動制御を行なうことを可能とする脚式移動ロボットを提供する。
【解決手段】ロボット1の移動時に、該ロボットの現在の動作制御のために使用している床面形状の情報により表される床面である現状想定床面に対するロボット1の脚体5L,5Rの複数歩分の着地予定位置を設定し、その各着地予定位置毎に、該着地予定位置の近辺に、ロボット1に搭載されたカメラ27L,27Rの撮像画像に投影する画像投影領域A(i)を設定する。設定した各画像投影領域A(i)をカメラ27L,27Rの撮像画像の撮像画像に投影してなる部分画像領域の画像に基づいて、各部分画像領域毎に、該部分画像領域内に撮像されている実際の床面である実床面部分領域Ar(i)の形状を表す形状パラメータ(n(i),d(i))を推定する。
(もっと読む)
廃棄物処理装置及び廃棄物処理方法
【課題】容器内雰囲気の初期的昇温・昇圧のための熱負荷及び加圧負荷を軽減するとともに、反応容器を大型化することなく、廃棄物処理量を増大する。
【解決手段】廃棄物処理装置(1)は、有機性廃棄物(W1)を高温・高圧の容器内領域(18)で攪拌して加水分解させる第1容器(10)と、加水分解した廃棄物(W2)を高温・低圧の容器内領域(28)で加熱乾燥させる第2容器(20)と、第1容器内の雰囲気を解放せずに廃棄物(W0)を第1容器の容器内領域に導入する廃棄物供給装置(30)と、第1容器内の雰囲気を解放せずに第1容器内の廃棄物(W1')を第2容器内に移動させる廃棄物移動装置とを有する。
(もっと読む)
射影変換収束演算処理方法
【課題】2つのカメラの撮像画像内の物体の平坦部を観測するために、それらの撮像画像間の射影変換を利用した収束演算処理を行なう方法において、その収束演算処理の収束性を確保しつつ、演算負荷を軽減する。
【解決手段】収束演算処理における射影変換行列の所定種類のパラメータ(n(i),d(i))の初期値(n0(i),d0(i))により規定される平面πa(i)が、観測対象の物体の平坦部を包含する実際の平面に対して傾斜した平面になることを該初期値(n0(i),d0(i))が満たすべき制約条件とし、該初期値(n0(i),d0(i))を該制約条件を満たす値に設定する。
(もっと読む)
潤滑油組成物及びその製造方法
【課題】長期にわたり潤滑機能の低下が抑制され、長期間の使用が可能な、特にエンジン油に好適な潤滑油組成物及び含有されるマイクロカプセル(MC)の分散状態を有効に維持した前記潤滑油組成物を、効率良く製造する製造方法を提供すること。
【解決手段】本発明の組成物は、潤滑油基油と、該基油に分散させる、潤滑油用添加剤を内包したMCと、該基油に配合する、無灰分散剤及び/又はポリエーテル系界面活性剤とを含む。本発明の製造方法は、潤滑油用添加剤を内包したMCと油溶性の鎖状炭化水素化合物との混合物(a)を準備し、また潤滑油基油に、少なくとも無灰分散剤及び/又はポリエーテル系界面活性剤を配合した混合物(b)を準備し、混合物(a)及び(b)を混合し、該混合物から、混合物(a)に含まれる鎖状炭化水素化合物を除去する工程を含む。
(もっと読む)
フィルムおよび塗膜形成用組成物
【課題】顔料といった色材を含有させなくても、効率よく、良好な遊色効果を発揮させることが可能なフィルムおよび塗膜形成用組成物を提供する。
【解決手段】屈折率が1.4〜1.6であり、平均粒径が300nm〜1μmで、変動係数が10%以下の微粒子を含有し、当該微粒子により最密充填構造が形成されていることを特徴とするフィルムである。また、微粒子を含有し、当該微粒子により最密充填構造が形成され、光を入射させた際に反射される反射光が、フィルム表面に対する正反射角θに加えてθ±15°よりも外側の角度にも反射光を有することを特徴とするフィルムである。さらに、上記フィルムを粉砕して得られる粉砕フィルムを含有することを特徴とする塗膜形成用組成物である。
(もっと読む)
1,091 - 1,100 / 1,821
[ Back to top ]