
国立大学法人宇都宮大学により出願された特許
31 - 40 / 209
モータに供給する電流の時系列データを生成するプログラム、方法、装置及びレーザ加工装置
【課題】モータに印加される電圧を飽和させない電流の時系列データを得るのに有利な技術を提供する。
【解決手段】対象物を移動させるモータを含む制御系を第1状態から第2状態へ遷移させるために前記モータに供給する電流の時系列データをコンピュータに生成させるプログラムであって、前記コンピュータに、前記時系列データにより前記モータに印加される電圧の絶対値の最大値を制約する条件を含む制約条件を設定させ、前記時系列データを評価するための評価関数を設定させ、前記制約条件を満たすように、且つ、前記評価関数の値が所定の条件を満たすように、前記時系列データを求めさせる、ことを特徴とするプログラムを提供する。
(もっと読む)
光記録方法、及び光再生方法

【課題】クロストークの影響が少ない状態で、3以上の多重記録を可能にする多重記録方法を提供する。
【解決手段】光照射により屈折率の異方性を生じる光誘起複屈折性を示す材料からなる偏光感応層を有する記録媒体の所定の記録領域に対し、複数の第1の信号光及び複数の第1の参照光を、それぞれの偏光状態を変化させた状態で経時的に連続して照射し、第1のホログラフィック多重記録を行うステップと、前記記録媒体の前記記録領域に対し、前記記録媒体のブラッグ条件を経時的及び連続的に変化させた状態で、複数の第2の信号光及び複数の第2の参照光を、それぞれ前記記録媒体の前記ブラッグ条件の変化と同期させて照射し、第2のホログラフィック多重記録を行うステップと、を具えるようにして光記録を実施する。
(もっと読む)
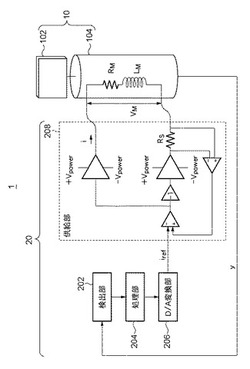
電界結合非接触給電システム
【課題】アクティブキャパシタを利用して、LC共振を用いずに、送電電力を増加させることができる電界結合非接触給電システムを提供する。
【解決手段】給電領域2に配置された給電部4と、被給電領域3に配置されて負荷8に電力を供給するための被給電部5とを有し、給電部4は、電源部11と、アクティブキャパシタ21と、アクティブキャパシタ制御部25と、給電領域2と被給電領域3との境界部6を構成する結合コンデンサ31,32とを備えている。アクティブキャパシタ21は、結合コンデンサ31,32のいずれかに直列接続されており、アクティブキャパシタ制御部25によりアクティブキャパシタ21の直流電圧Vcjの位相が電源部11の直流電圧Vsの位相から遅れるように(例えば90°)制御されている。
(もっと読む)
雑草抑制材
【課題】ペーパースラッジ焼却灰を有効活用する技術を提供する。
【解決手段】ペーパースラッジ焼却灰を含む造粒固化体を含んでなる雑草抑制材。好ましくは、前記造粒固化体が、ペーパースラッジ焼却灰を含む焼却灰から水熱反応によって得られる、雑草抑制材。さらに、前記雑草抑制材を土壌表面および/または土壌中に敷設することを含む、雑草の生育を抑制する方法。
(もっと読む)
導波路型光変調器
【課題】 簡単な構成でマイクロ波帯などの超高周波域で高い変調効率を実現することが可能な導波路型光変調器を提供すること。
【解決手段】 基板2と、マッハツェンダー型光導波路3と変調電極とからなり、変調電極は電界印加線路4a、5aを備えた4段の共振電極部9と給電部6とからなり、給電結合線路7b、8b、共振結合線路4b、5bにより各部間の結合がなされている。各共振電極部および4段の共振電極部全体が変調信号の周波数において共振器となるように構成され、1段目と3段目の電界印加線路で同相の電界となり、2段目と4段目の電界印加線路で逆相の反転電界となるように、線路長が調整され、電界印加線路4a、5aの配置の周期Pは、位相シフト光導波路3b,3cの等価屈折率をn、変調信号の周波数をf、真空中での光速をcとすると、P=c/2nfとなるように配置されている。
(もっと読む)
自律移動方法及び自律移動体
【課題】環境磁場を利用する自律移動を屋外で行う場合でも、ロボットが自己位置を誤って認識するのを防ぐことのできる自律移動方法及び自律移動体を提供する。
【解決手段】ステップ1:互いに反転して配置される第1センサ201及び第2センサ202で磁気、方位を計測し、記録しておく。このデータを教示データ(第1教示データ、第2教示データ)という。
ステップ2:自律移動する際に、各々のセンサで磁気、方位を計測する。このデータを実測データと(第1実測データ、第2実測データ)いう。
ステップ3:実測データを教示データに照合して両データの偏差が0になるように位置を制御する。この照合に際し、不安定な磁気要素を相殺する。
(もっと読む)
鉄鋼スラグからのリチウム回収方法およびリチウム回収装置
【課題】鉄鋼スラグからリチウムを回収する方法およびリチウム回収装置を提供する。
【解決手段】鉄鋼スラグと水とを耐圧密閉容器に装入する装入ステップと(ステップS101)、前記耐圧密閉容器を加温して、収容される水を所定の高温高圧水とする加温ステップと(ステップS103)、前記加温ステップで生成した前記高温高圧水と前記鉄鋼スラグとの接触により前記鉄鋼スラグ中のリチウムを前記高温高圧水中に溶出させる溶出ステップと(ステップS104)、前記溶出ステップ後、リチウムを溶出した高温高圧水を前記耐圧密閉容器からリチウム回収手段に排出する排出ステップと(ステップS105)、前記リチウム回収手段に排出され、収容される処理水中に共存する他の無機成分を除去する除去ステップと(ステップS106)、を含む。
(もっと読む)
無機成分の溶出方法、無機成分の分析方法、無機成分の溶出装置、および無機成分の分析装置
【課題】無機物を含む物質から、極めて短時間で多量の無機成分の溶出を可能とする無機成分の溶出方法、および前記溶出方法により溶出した無機成分の分析方法、ならびに無機成分の溶出装置を提供する。
【解決手段】本発明は、無機物を含む物質と水とを耐圧密閉容器に装入する装入ステップと(ステップS101)、前記耐圧密閉容器を75℃〜370℃に加温して、収容される水を飽和蒸気圧以上の高温高圧水にする加温ステップと(ステップS103)、前記加温ステップで生成した前記高温高圧水と前記無機物を含有する物質との接触により前記物質中の無機成分を前記高温高圧水中に溶出させる溶出ステップと(ステップS104)、を含むことを特徴とする。
(もっと読む)
視覚的力表示器並びに視覚的力理科教材及び科学玩具
【課題】使用する際の向きの制約を受けることなく、作用している力の向きと大きさを視覚的に表示できる力表示器を提供することを目的とする。
【解決手段】3軸加速度センサ20から取得するx軸方向、y軸方向及びz軸方向の加速度に基づいて、軸方向の各々について、3軸加速度センサ20に作用する重力以外の力に対応する短周期加速度値(Sx、Sy及びSz)及び3軸加速度センサ20に作用する重力に対応する長周期加速度値Lx、Ly及びLzを求める。次いで、短周期加速度値(Sx、Sy及びSz)及び長周期加速度値Lx、Ly及びLzに基づいて、軸方向の各々について表示情報を生成する。この表示情報に基づいて軸方向に作用する力の向きと大きさを表示する。
(もっと読む)
形状測定方法及び装置並びに歪み測定方法及び装置
【課題】高精度且つ高感度の形状測定を実現できるフリンジ投影法による形状測定方法及び装置、並びに歪み測定方法及び装置を提供する。
【解決手段】光源部11からの光22を格子板12に照射し、格子板12を透過した光23を被測定物14上に格子像として投影し、その格子像を撮影して格子像の歪みから被測定物14の3次元形状を計算して数値化する。三次元形状の数値化は、格子像の画像データ取り込みステップ、取り込んだ画像データの二次元フーリエ変換ステップ、n次のピーク信号取り出しステップ、位相分布を含む信号の逆フーリエ変換ステップ、及び三次元形状数値化ステップをその順で含む。
(もっと読む)
31 - 40 / 209
[ Back to top ]