
公立大学法人岡山県立大学により出願された特許
1 - 8 / 8
自動車用シートの振動抑制装置
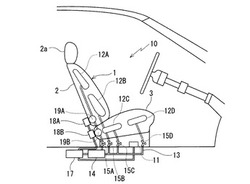
【課題】自動車用シートに座った乗員にかかる振動をより低減することができる自動車用シートの振動抑制装置を提供する。
【解決手段】乗員にかかる振動の周波数を検出する振動センサー11と、背もたれ部2及び座部3に内蔵されたエアクッション12A,12B,12C,12Dと、エアクッション12A,12B,12C,12Dのそれぞれに空気を供給する空気供給手段13,14,15A,15B,15C,15Dと、背もたれ部2及び座部3の角度を変化させる角度調整手段18A,18B,19A,19Bと、乗員にかかる振動の周波数に対応した、振動を最小とする背もたれ部2及び座部3の硬さと角度である最適パターンが予め入力されたパターン表が記憶された記憶部16と、最適パターンを記憶部16から読み出して、背もたれ部2及び座部3の硬さと角度を最適化させる制御部17を備える。
(もっと読む)
ポンプ

【課題】往復運動する振動板によってポンプ室の容積を変化させることで流体を送給するポンプにおいて、振動板の往復運動にともなってバルーン部が変形することによる膜自体の伸縮を抑制し、省エネルギー化を達成することで効率を向上させ、寿命を長くする。
【解決手段】往復運動することでポンプ室の容積を変化させる振動板3を、中空状のバルーン部13を介して支持する構成において、ハウジング4の斜面部11b、12bの傾斜角度α、バルーン部13の周長L、および径方向の寸法(高さσ)、並びに振動板3の半径t、が、振動板3の往復運動の範囲で、次式により定義されるひずみの値が最小となるように設定されている。
ε={(v−vn)/vn}×100
ここで、ε:ひずみ(%)、v:振動板3の中心位置からバルーン部13の周方向の所定の位置までの距離、vn:振動板3が往復運動の範囲の中央位置にあるときのvである。
(もっと読む)
足型分類装置
【課題】被計測者の歩行に関する運動能力を容易に判断する。
【解決手段】土踏まず検出部144が、圧力分布センサ11における被計測者の足裏と接触する接触領域69から被計測者の足裏に係る土踏まずの状態を示すパラメータを検出する。当該パラメータに基づいて、足首傾斜状態検出部145が、被計測者の足首関節の傾斜状態を検出し、足裏湾曲状態検出部143が、被計測者の足裏の湾曲状態を検出する。分類部146が、足首傾斜状態検出部145及び足裏湾曲状態検出部143の検出結果に基づいて、被計測者の足型を、歩行に関する運動能力の指標となる、扁平型、回内足型、外側荷重足型、回外足型、凹足型、土踏まず変形足型及び正常な足型に分類する。
(もっと読む)
運動支援装置
【課題】トレーナーや医者等の負担を軽減して、被計測者に種々な運動を行わせることが可能な運動支援装置を提供する。
【解決手段】運動支援装置1は、被計測者から視認可能な位置に配置されるディスプレイ21を備えており、そのディスプレイ21には、被計測者が圧力分布センサ上で行う運動を誘導するためのアニメーションAが表示される。また、ディスプレイ21には、圧力分布センサにより検知された圧力分布データに基づいて生成された圧力分布映像Bが、アニメーションAと共に表示される。
(もっと読む)
重心動揺型分類装置
【課題】被計測者の歩行に関する運動能力を容易に判断する。
【解決手段】検知部131の重心算出部133が、圧力分布センサ11上における立位静止状態の被計測者の重心位置を算出する。重心動揺型分類部141が、制御周期毎に被計測者の重心位置を検出すると共に、先の制御周期で検出した重心位置からの移動方向及び移動距離を算出する。方向別積算部144が、解析結果記憶部143に記憶された内容に基づいて、前後方向、左右方向及び2つの斜め方向のそれぞれについて、移動距離を積算する。分類部146が、積算結果に基づいて、重心位置記憶部134を参照して、被計測者の重心動揺型を、集中型、前後型、左右型、斜め型、複合型及び分散型のいずれかに分類する。
(もっと読む)
圧力分布測定センサ装置
【課題】被計測者の歩行に関する運動能力を容易に判断する。
【解決手段】重心軌跡算出部131の軌跡算出部135が、圧力分布センサ11上におけるローテーション動作状態の被計測者の重心位置の軌跡を算出する。安定輪郭抽出部141の抽出部142が、重心位置の軌跡に基づいて、圧力分布センサ11上において閉曲線となる安定輪郭を抽出する。
(もっと読む)
3次元モデルを用いた自己位置認識手法及び自己位置認識システム
【課題】移動空間内のレイアウトを変更しても容易に適用でき、導入コストが小さく、さらに、高速且つ正確に自己位置認識する。
【解決手段】移動空間の3次元モデルを作成する手段21と、所定時間における移動体の位置及び方向からカメラ画像を取得する手段10と、所定時間における目標軌道上の目標位置及び方向を算出する手段17と、3次元モデルから目標位置及び方向の所定範囲内における複数の位置及び方向のモデル画像を形成する手段15と、この複数のモデル画像とカメラ画像との色情報の一致度を算出する手段16と、この各一致度に基づいて、移動体の位置及び方向を認識する手段18とを備えた。
(もっと読む)
半導体レーザモジュール
【課題】結合効率が高く位置合わせのトレランスが大きい結合を、簡単な構成で実現できる半導体レーザモジュールを提供する。
【解決手段】本発明の半導体レーザモジュール300は、半導体レーザ素子100と少なくとも1つの屈折率分布型ロッドレンズ200とを備える。半導体レーザ素子100は、半導体基板10と、半導体基板10上に積層された半導体多層膜を備える。半導体多層膜は、基板側から順に積層された下側クラッド層、活性層、および上側クラッド層を含む。半導体基板10および半導体多層膜は、平坦面101と、平坦面101から突出するように形成され且つ第1および第2の端面を含む積層構造102とを構成している。屈折率分布型ロッドレンズ200は、レーザ光がロイドのミラー干渉を生じる位置に配置されている。
(もっと読む)
1 - 8 / 8
[ Back to top ]