
グラコ ミネソタ インコーポレーテッドにより出願された特許
1 - 10 / 32
リニアポンプ装置の制御装置及び方法
リニアポンプ装置の作動装置及び方法であって、リニアモータ装置を作動させ、リニアポンプを往復運動させる。モータ制御モジュールは、リニアモータ装置に指令と制御ロジック入力とを発する。リニアモータ装置が作動して、第1反転位置と第2反転位置との間を出力軸が往復運動する。この出力軸によりリニアポンプが往復運動して材料の流動を生じさせる。ポンプ反転指令は、出力軸の移動方向を反転させる。トルク指令は出力軸の速度を制御する。制御ロジック入力により、材料の流動の一定の出力状態を得る速度で出力軸が往復運動する。モータ制御モジュールは、反転指令が発せられた時点を起点とする一時的な期間にわたり、トルク指令を調整して、一定の出力状態に必要な速度より増大した速度で出力軸を作動させる。 (もっと読む)
潤滑剤ポンプはめ込み式エンクロージャ
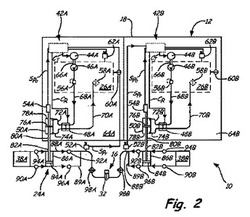
エンクロージャ10は油圧ポンプライン14にスロートシールリキッド(TSL)12を流すために用いられる。油圧ピストンロッド20をケミカルロッド22に連結する連結パーツ18は、ケミカルポンプ又は油圧ポンプ24を修理するために、取り外し可能である。そして、二つのハウジングパーツ28,30は手作業で緩めることができる。ねじの先端が到達すると、小さいハウジング30は大きなハウジング28へと貫入し、ロッド連結器18への容易なアクセスが可能になる。貫通したエンクロージャの図は図2を参照のこと。 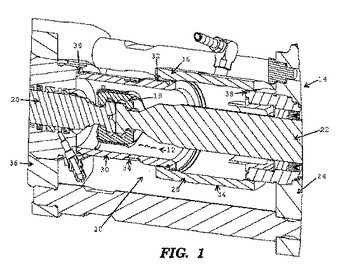 (もっと読む)
(もっと読む)
ファイバーロービングチョッパのカッターブレードヘッド

ファイバーロービングチョッパのためのブレードカートリッジは、環状支持体と複数のブレードホルダとを備える。複数のブレードホルダのそれぞれは、主部、第1端部、第2端部、及び刃を備える。主部の第1端部は、環状支持体に結合されている。主部の第2端部は、主部が片持ち状態で環状体から突出するように、第1端部の反対側に位置している。刃は主部に一体的に固定され、第1端部と第2端部との間に延びる。本発明のさらなる形態において、ブレードホルダの主部は、主部と刃とにわたって延設される第1端部切欠と第2端部切欠とを含む。 (もっと読む)
バルブアクチュエータ
配合供給ガンは、ガン本体と、第1成分注入口と、第2成分注入口と、配合ヘッド部と、第1バルブと、第2バルブと、挟持部材と、トリガとを備える。第1成分注入口及び第2成分注入口はガン本体に取り付けられ、第1成分及び第2成分を注入する。配合ヘッド部は、第1成分及び第2成分を配合して供給する。第1バルブ及び第2バルブはガン本体に取り付けられ、第1成分及び第2成分の供給を制御するバルブステムを有する。挟持部材は上部部材及び下部部材を有し、上部部材と下部部材との間は第1バルブステム及び第2バルブステムが配置される。第1バルブステム及び第2バルブステムが、これらバルブステムの軸線と平行な方向へのバルブアクチュエータの移動によって移動するように、上部部材及び下部部材が取り付けられる。トリガはガン本体に取り付けられ、挟持部材の移動を制御する。 (もっと読む)
ファイバロービングチョッパ用のアンビル
【解決手段】ファイバロービングチョッパ用のアンビル組立体は、環状ローラー及び環状アンビルホイールを備える。環状ローラーは、複数の蟻継ぎ部を有する内径面及び可撓性の材料からなる外径面を備える。環状アンビルホイールは、ファイバロービングチョッパ内にアンビル組立体を取り付けるための中心空洞を形成する内径面、及び第1端と第2端との間に延在し且つ環状ローラーの複数の蟻継ぎ部を受容する複数の蟻継ぎスロットを有する外径面を備える。 (もっと読む)
一体型弁ロッド潤滑剤カートリッジ
配合ガンは、少なくとも2種の流体成分を混合する混合ヘッド部と、混合ヘッド部内をスライド可能に配置されたパージロッドとを備える。パージロッドは、パージロッドを移動させるためのアクチュエータを用いて流体成分の注入口からの流入を妨げる前進位置と、流体成分の注入口からの流出を許容する後退位置とを有する。配合ガンは、潤滑剤カートリッジからの潤滑剤を用いてパージロッドに潤滑剤を供給する潤滑剤チャンバをさらに備える。 (もっと読む)
ポンプライン線形位置検出アセンブリ
2ピースのカラー10は二つのショルダーボルト14を介して油圧駆動装置のシャフト12に堅固に固定されている。カラーのそれぞれ半分16は、直線状のセンサーシャフト22に組みつけられているスプール20上のぴったりと許容する溝構造18と係合している。スプール20は、センサ26に位置信号を送る磁石24を収容している。作動中に油圧駆動装置のシャフト12が往復すると、スプール20はそれに沿って移動し、駆動装置28の向きを変えるためにセンサ26に位置信号を送信する。油圧駆動装置及び化学ポンプのシャフト12は時間をかけてゆっくりと回転することができ、それは化学ポンプ/油圧駆動装置のシールの寿命を長くするために好ましい。 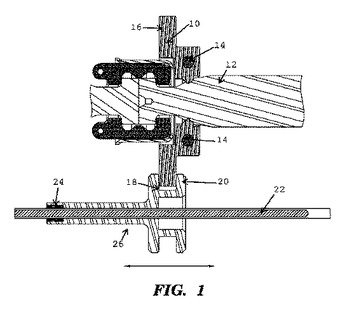 (もっと読む)
(もっと読む)
電子的にモニタされた空気バルブ及びピストンを有する往復ポンプ
【課題】改良された監視と往復空気モータの制御とを可能にする事で、ピストンの位置と、回転及び流れの速さと、合計回転と、暴走の制御と、空気モータ及びポンプの下部部品の故障を診断する性能とをモニタすることを提供する。
【解決手段】空気作動ポンプ10は、空気モータ18のバルブキャップ16に取付けられた磁石14と、バルブカバー22に取付けられた二つのリードセンサ20とを用いてバルブの速度及び位置をモニタする。ソレノイド24はバルブカバー22に取付けられており、バルブキャップ16にプランジャ26を延ばすことでバルブの動き、そしてポンプが暴走するのを止めるよう設定されている。磁気抵抗センサ34は、空気モータ18の中心に配置される事でピストン36の位置を正確にモニタし、空気バルブセンサ20と共にポンプ10の正確な制御及び診断に必要な入力を提供しており、それを測定及び複数の部品適用に適合させる。
(もっと読む)
モータ制御モジュール
電気モータ34のための制御モジュール10が提供される。DCブラシレスモータを含むそのようなモータ34が、複数のコンポーネントの定量装置を含んだ数多い種類の装置で共通して使用されている。本願の設計では、4つのボード、すなわち、パワー調整モジュール12、最上部ボード14、中央部ボード15、及び最下部ボード18とを有している。 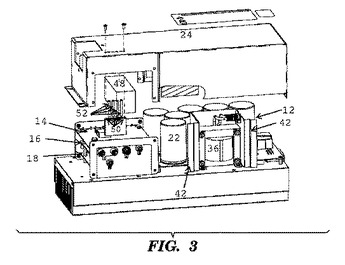 (もっと読む)
(もっと読む)
空気圧駆動のパイロットバルブ
空気モータの操作を制御するために用いられる四方バルブは、パイロットバルブ等によって空気圧で作動される。パイロットバルブ20の上流側の圧力低下にかかわらず、高圧の空気/信号ポート部22において制限を作り出すことによって、パイロットバルブ20は正しく機能する一方、一旦パイロットバルブ20が作動すれば、十分な流れをも許容する。ポペットバルブ28の上にあるパイロットバルブ20の入口部30を制限する付加的なスライドバルブ24が、パイロットバルブ20に取り付けられる。スライドバルブ24はさらなる圧力低下を生み出す。図3を参照。一旦作動ピン32がポペットバルブ20に接触すると、その余分な圧力低下によってパイロットバルブ20が強制的に開状態となり、ヒステリシスが生まれる。一旦パイロットバルブ20が開状態となると、スライドバルブ24が動いて高圧ポート部22の覆いが外れ、制限が取り除かれ、確実に主の四方バルブ10が適切に作動する。 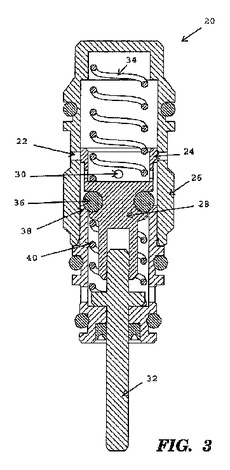 (もっと読む)
(もっと読む)
1 - 10 / 32
[ Back to top ]