
プライムセンス リミテッドにより出願された特許
1 - 9 / 9
非触覚ユーザインタフェース用場面プロファイル
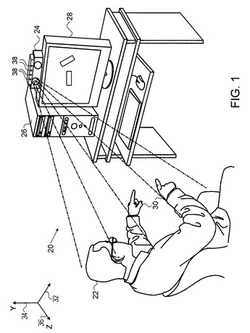
【課題】非触覚検知に基づくコンピュータシステム用ユーザインタフェースを提供する。
【解決手段】非触覚インタフェースを実行するコンピュータに接続するディスプレイの近くに1人以上のユーザを有する場面の画像を獲得するステップと、前記画像を処理し、前記1人以上のユーザのプロファイルを生成するステップとを有する。コンテンツはその後、前記ディスプレイ上に上映するため前記プロファイルに対応して選択される。
(もっと読む)
マシンビジョン用マルチプロセッサシステムオンチップ

【課題】メインメモリに記憶されるデータを使用するソフトウェアを実行するように設定された、多重のプロセシングコアを含むマルチプロセッサシステムにおける共用資源の効率的使用のための方法及びシステムを提供する。
【解決手段】マルチプロセッサシステム10は、プロセッサコア200と外部メモリ500間を接続し、多重のプロセッサコア200による使用のため、データを外部メモリ500から事前に取得するように設定された、データストリーミングユニット2000を含む。マルチプロセッサシステム10は、プロセッサコア200に接続し、そして、多重のプロセッサコア200のために、2つ以上のプロセッサコア200に同時に1つの所与のデータアイテムにアクセスさせる、ソフトウェアの選択された部分を実行するように設定される、スクラッチパッドプロセスユニット1000を含む。
(もっと読む)
3次元場面の分析
【課題】深さマップを処理する頑丈で効率的な方法を提供する。
【解決手段】データを処理する方法であって、ヒト類似形状を含むある場面の深さマップを受信するステップを有する。深さマップはその場面内の3次元(3D)結合構成要素を識別するために処理される。それぞれの結合構成要素は、相互に隣接し、かつ相互に次の深さ値を有する1組のピクセルからなる。別個の分離した第1と第2の結合構成要素は両方とも、ヒト類似形状に属すると識別される。そしてヒト類似形状の画像が第1と第2の結合構成要素を含んで生成される。
(もっと読む)
ビームモニタ付き光学プロジェクタ
【課題】製造精度、現場の条件により変化が一定の限度を超えない光学プロジェクタを提供する。
【解決手段】光学装置は、装置パッケージと、前記パッケージに内蔵され、またコヒーレントな放射ビームを放出するように構成された放射源を有する。回折光学素子(DOE)が、前記放射源からの放射を受け取り、そして多重の回折次元を有する既定のパターンに回折するため、前記パッケージ内に載置される。光学検知器が、前記DOEの選択された回折次元を受け取り、前記選択された回折次元の強度を検知するため、前記パッケージ内に置かれる。
(もっと読む)
投影照明の画像センサの回転シャッタとの同期
【課題】CMOSセンサーによる撮像時に、投影照明と回転シャッタとの同期を取る。
【解決手段】画像形成装置は照明組立体を有し、照明組立体は、複数の放射源と投影光学系を有し、放射源から視覚野の異なるそれぞれの領域の上へ放射を投影するように構成される。画像形成組立体は、画像センサ上に視覚野の光学的画像を形成するように構成された、画像センサと対物光学系を有し、画像センサは、多重のグループ内に配置されたセンサ要素の1配列を有し、画像センサは、視覚野の電子画像を形成するため、回転シャッタによりトリガーされて、連続するそれぞれの露出期間において、視覚野の異なるそれぞれの区域からの放射を獲得する。制御装置は、照明組立体が視覚野の異なるそれぞれの区域を前記回転シャッタと同期して照明するために、放射源をパルスモードで順次活性化するように接続される。
(もっと読む)
3次元マッピング用集積処理装置
データ処理装置(50)は、カラー画像データを第1の画像センサ(46)から受け取るための第1の入力ポート(70)と、深さ関係画像データを第2の画像センサ(40)から受け取るための第2の入力ポート(64)を有する。処理回路(62)は、前記深さ関係画像データを使用して深さマップを生成する。少なくとも1つの出力ポート(86)は、前記深さマップと前記カラー画像データをホストコンピュータ(26)に伝達するように構成される。 (もっと読む)
0次低減のための光学設計
1つのパターンを投影する装置(10)であって、1つの0次光線(32)を有する第1の回折パターン(23)を1つの表面(24)の第1の区域(22)に生成するために1つの入射光(20)を回折するように構成された第1の回折光学素子(DOE)(12)を有する。第2の回折光学素子(DOE)(14)は第2の回折パターン(29)を上記表面の第2の区域(27)に形成するために上記0次光線を回折するように構成される。ここにおいて第1の区域と第2の区域は共同して上記表面(24)を少なくとも部分的に覆う。 (もっと読む)
深度マップによるヒューマノイド形状のモデル化
コンピュータに実装された方法であって、ヒューマノイド対象物(28)の身体を含むシーンの深度マップ(30)を受け取るステップを含む。前記深度マップはピクセルのマトリクス(32)を含み、それぞれのピクセルは、前記シーンにおけるそれぞれの位置に対応し、基準位置から前記それぞれの位置までの距離を示すピクセル値を有する。前記深度マップは、セグメント化され前記身体の輪郭(64)が発見される。前記輪郭は、処理され、前記対象物のトルソ(70)と1又は複数の手足(76、78、80、82)とが識別される。前記深度マップにおける前記識別された手足の少なくとも1つの配置を解析することにより、コンピュータにおいて動作しているアプリケーション・プログラムを制御する入力が生成される。  (もっと読む)
(もっと読む)
スペックルパターンを用いた三次元検出
被写体(28)の三次元マッピング装置(20)は、被写体(28)上に第1次スペックルパターンを投影するよう配されたコヒーレント光源(32)と拡散板(33)とを有する照明アセンブリ(30)を有する。単一の画像獲得アセンブリ(38)は、照明アセンブリに対して相対的に、単一かつ固定の位置および角度から、被写体上の第1次スペックルパターン画像を獲得するように配されている。プロセッサ(24)は、被写体の三次元マップを導き出すために、単一かつ固定角度で獲得された第1次スペックルパターンの画像を処理するために接続されている。 (もっと読む)
1 - 9 / 9
[ Back to top ]