
ファナック株式会社により出願された特許
1,001 - 1,010 / 1,110
制御装置
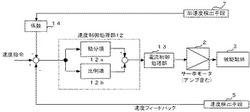
【課題】サーボモータで駆動される被駆動体の振動を抑制する。
【解決手段】 サーボモータ2で駆動される被駆動体3に加速度検出手段7を設ける。該加速度検出手段7で検出された加速度検出値に係数14を乗じて補正値を求め、速度指令からこの補正値を減じて補正し、速度制御処理部12で速度フィードバック制御を行い、電流指令を求める。さらに電流制御処理を行ってサーボモータ2を駆動し、被駆動体3を移動させる。被駆動体の振動により加速度検出値が増大すれば、速度指令が補正されてこの振動を抑制するように作用するから、被駆動体3の振動は抑制される。加速度検出値に基づく速度指令の補正処理を速度制御処理周期毎実行することにより、処理時間を少なくして、被駆動体3の振動を抑制できる。
(もっと読む)
レーザ加工装置

【課題】 焦点距離を変更したことと同様の効果が得られるレーザ加工装置を提供する。
【解決手段】 集光レンズ20aに入射されたレーザビームのうち平面部24aに入射された部分は、集光されないのでそのまま平行光としてワーク12上の集光点14に照射され、レーザ加工において補助的役割を果たす。一方曲面部22aに入射されたレーザビームの部分は、集光点14の外周付近に集光されて照射される。
(もっと読む)
回転軸制御装置
【課題】 回転運動の加速度の他に並進運動の加速度が相定される構成においても、角加速度センサを用いることなく角加速度のみを検出する。
【解決手段】 回転体22上に、同一半径上に回転の接線方向の加速度を検出する方向に2つの加速度センサ18,20を配置し、それらが検出した加速度X1,X2から、計算により回転の角加速度を算出する。
(もっと読む)
回転軸の制御装置
【課題】 回転体と検出器との間に剛性の低い部分が存在することによる振動を抑制または防止する。
【解決手段】 回転体10の回転角加速度を検出する角加速度センサ16を設け、角度/角速度指令値を角加速度の値に従って補正(18)する。
(もっと読む)
制御装置
【課題】 機械の経年変化による強度低下により保守必要性や、動作異常等を検出する制御装置を得る。
【解決手段】 サーボモータで駆動される被駆動体に加速度検出手段と取り付ける。サーボモータの位置、速度のフィードバック制御を行う軸制御回路のプロセッサは、位置、速度制御処理周期毎、位置、速度フィードバック制御処理を行い電流指令を求め電流ループ処理に出力する(a1〜a6)。また、加速度検出手段より加速度検出値αfを読み取り(a7)、該加速度検出値αfがスレショルド値αs以上のとき(a8)、異常信号を出力し、アラーム表示、機械動作停止等を行う。被駆動体の加速度を加速度検出手段で直接検出するから、機械が古くなり振動が多くなったとき、被駆動体が他の物と衝突したとき、部品の破損等の機械異常が発生したときなど、異常を確実に検出できる。
(もっと読む)
ロボットの線条体支持装置及び線条体支持装置を備えたロボット
【課題】 コンジットの干渉領域を極力小さくするとともに、補助装置を使用しなくてもコンジットの不都合な余長を吸収できる簡易な構造の線状体案内装置、及び該装置を備えたロボットを提供する。
【解決手段】 上腕10には第1のコンジット支持部材20が設けられ、手首14には第2のコンジット支持部材22が設けられる。コンジット18は、第1のコンジット支持部材20及び第2のコンジット支持部材22により固定又は捩れ回転可能に支持され、さらに両コンジット支持部材の間、詳細には前腕12の側方に近接配置された保持手段24により摺動、該摺動の方向に沿う軸線回りの回転、及び該軸線に垂直な軸線回りの回転を可能に保持される。保持手段24は前腕12になるべく近接するように設けられるため、コンジット18と前腕12との隙間が小さくなり、外部の周辺機器等との干渉を最小限に抑えることができる。
(もっと読む)
ガスレーザ発振器
【課題】 操作者の作業を伴うことなしに、放電点灯前にレーザガスの異常を判断することにより放電管が絶縁破壊により破損するのを防止する。
【解決手段】 放電点灯前における放電管の複数の放電管セグメント(6a〜6d)毎の電圧を検出する電圧検出手段(4a〜4d)と、電圧検出手段により検出された複数の放電管セグメントの電圧(Vn)に基づいて、複数の放電管セグメントのそれぞれを点灯するか否かを判定する放電管セグメント点灯判定手段(1)とを具備し、放電管セグメント点灯判定手段は、複数の放電管セグメントのうちの全ての放電管セグメントの電圧が所定の電圧(Vb)よりも小さい場合にのみ、複数の放電管セグメントの全てを点灯させるようにしたガスレーザ発振器(10)が提供される。
(もっと読む)
レーザ加工ロボットシステム及びその制御方法
【課題】 レーザ加工ロボットシステムにおけるレーザスキャンヘッドの早送り動作に要する時間を短縮して、サイクルタイムの短縮及び加工効率の向上を図る。
【解決手段】 レーザ加工ロボットシステム10は、マニピュレータ12と、マニピュレータ12に装着されるレーザ加工ツール14と、マニピュレータ12及びレーザ加工ツール14の動作を制御する制御装置16とを備える。レーザ加工ツール14は、可動ミラー20を内蔵するレーザスキャンヘッド18と、レーザスキャンヘッド18を移動可能に支持する可動支持機構22とを備える。制御装置16は、レーザスキャンヘッド18がレーザ光を出射しない非加工時に、可動支持機構22の動作を制御して、レーザスキャンヘッド18を早送り動作させる早送り動作制御部24を備える。
(もっと読む)
制御装置
【課題】 被駆動体の振動による加工精度の低下や運動精度の低下を防止する。
【解決手段】 被駆動体に加速度を検出する加速度検出手段を取り付けておく。前ブロックが位置決め指令であったとき(a3)、この位置決め指令の移動指令分配完了後、加速度検出手段で検出される加速度検出値が設定値αs以下になるまで待つ(a5)。加速度検出値が設定値αs以下となると、次ブロックの移動指令の分配を開始する(a6)。加速度検出値が設定値αs以下となり、振動が停止した後、切削送り等を開始するから、精度が高い加工を行うことができる。また、無駄な待ち時間がなくなり加工時間を短縮できる。また、加減速時等での振動発生を抑制するためにオーバライド値を変えたり、加減速時定数を変えて振動を抑制する。
(もっと読む)
駆動制御装置
【課題】 加速度センサの動作及び取付け方向についての異常の有無を判定することができる駆動制御装置を提供する。
【解決手段】 駆動装置10を介して被駆動体12の動作を制御する駆動制御装置が、被駆動体の位置又は速度を検出する位置又は速度検出手段20,22と、被駆動体に取り付けられ、位置又は速度検出手段とは別に被駆動体の加速度を検出する加速度検出手段26とに加えて、加速度検出手段からの加速度情報に基づいて加速度検出手段の動作又は被駆動体への取付けについての異常の有無を判定する判定手段130を具備するように構成される。判定手段からの判定情報が異常を示すときには、加速度検出手段からの加速度情報を使用することなく、位置又は速度検出手段からの位置又は速度に基づいて、被駆動体の動作を制御する。
(もっと読む)
1,001 - 1,010 / 1,110
[ Back to top ]