
ファナック株式会社により出願された特許
101 - 110 / 1,110
射出成形機の表示装置
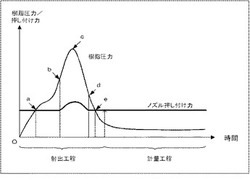
【課題】樹脂漏れが発生したタイミングと、そのタイミングでの樹脂圧力の値を確認することが可能な、射出成形機の表示装置を提供すること。
【解決手段】射出からの経過時間に対応させて、溶融樹脂の樹脂圧力とノズルの押し付け力を同一グラフ上に表示した例であり、樹脂圧力の曲線上の符合bはノズル2の押し付け力が上昇開始時の樹脂圧力,符号cは最大の樹脂圧力,符号dはノズル2の押し付け力が元に戻った時の樹脂圧力を示す。この例では射出中に樹脂圧力が(b)を迎えるタイミングでノズル押し付け力が上昇し始めているので、このタイミングで樹脂漏れが発生していると判断でき、グラフから樹脂漏れが発生したタイミングでの樹脂圧力がわかるため、射出中の樹脂圧力が、樹脂漏れが発生したタイミングの樹脂圧力以下となるように成形条件の変更を行えば樹脂漏れを防止できることがわかる。
(もっと読む)
直流交流変換装置を接続可能なモータ駆動制御装置

【課題】DC/AC変換装置を接続可能なモータ駆動制御装置において、モータ駆動制御装置に接続したDC/AC変換装置に接続されたモータの出力が大きい場合でも、AC/DC変換回路が過負荷状態になる事態を回避することができるモータ駆動制御装置を提供する。
【解決手段】接続部11にDC/AC変換回路20を接続したときのモータ4,5,6,19の出力の合計がAC/DC変換回路12によって供給可能な電力を超えると予測される場合、制御装置16は、モータ4,5,6,19の出力の合計をAC/DC変換回路12によって供給可能な電力以下に維持しながらAC/DC変換回路12からDC/AC変換回路13,14,15,20への直流電圧又は直流電流の供給又は供給停止を制御する。
(もっと読む)
記憶装置のデータ保護装置
【課題】キャッシュ領域に転送済みのデータが消失することを防止することが可能な記憶装置のデータ保護装置を提供すること。
【解決手段】制御装置10に備わった、データが格納される不揮発性データ記憶領域14と、不揮発性データ記憶領域14に格納されるデータを一時的に保存するキャッシュ領域15とを有する記憶装置13のデータ保護装置であって、入力電源から供給される電源の電圧を所定の電圧に変換する内部電源装置11と、入力電源から供給される電源の電圧を監視し該電圧の低下を検出した時に電圧低下信号を出力する電源監視回路12と、電圧低下信号を受信したときキャッシュ領域15に保存されたデータを不揮発性データ領域14に書き込む書き込み指令を出力する中央演算処理回路16と、前記書き込み指令が出力されたとき、キャッシュ領域15に保存されたデータを不揮発性データ記憶領域14に書き込むようにした記憶装置のデータ保護装置。
(もっと読む)
コギングトルクを低減するモータおよびリニアモータ
【課題】作成が容易でありつつ、コギングトルクを大幅に低減する。
【解決手段】モータ(10)は、磁束を通すコアに取付けられる複数の磁石を含むロータ(30)と、コイルが巻回される複数のスロット(21)が形成されたステータ(20)と、を具備し、ステータの横断面においてロータに対向する内周面が正弦波形状を含むようにした。さらに、ステータのコアの圧延方向からの周方向の角度をθとすると共に、コギングトルクに応じて定まる値をCとすると、ステータの横断面においてロータに対向する内周面は、C×|sinθ|で表される凹部を含む形状であるようにした。
(もっと読む)
ロボットの着目部位と周辺物との干渉を予測する方法及び装置
【課題】ロボットの手先に搭載されているツールやセンサ等の着目部位がロボットの動作に伴って移動する場合に、移動経路上での着目部位とロボットの周りに固定設置されている周辺物との干渉を、実用的な精度及び計算速度にて予測する方法及び装置の提供。
【解決手段】各時点Tjでツール3が占有する領域をD1,jとして、隣接する時点Tj−1、Tjの領域D1,j−1、D1,jの凸包Cjを計算する(ステップ111)。凸包Cjと多面体領域D2との共通領域の有無を調べる(ステップ112)。凸包Cjと多面体領域D2との共通領域が有る場合は、移動経路中でツール3と収納箱4とが干渉すると判断(ステップ113)して処理を終了し、共通領域が無い場合は、j<n(ステップ114)か否かを調べ、j≧nならば、移動経路中でツール3と収納箱4とが干渉しないと判断(ステップ115)して処理を終了する。
(もっと読む)
異常時モータ減速停止制御機能を有する制御装置
【課題】数値制御部およびモータ制御部の異常を検出する異常検出部を備え、前記数値制御部および前記モータ制御部のいずれにおいて異常が発生しても、前記異常検出部からの信号を受けて、減速停止専用モータ制御部に設けられたモータ減速停止制御部によりモータを減速停止させることが可能な異常時モータ減速停止制御機能を有する制御装置を提供すること。
【解決手段】機械50を制御する数値制御装置10は、移動指令を出力する数値制御部11と、数値制御部11からの移動指令に基づいてモータ40を駆動する指令を出力するモータ制御部12とを備え、アンプ20は、モータ制御部12からの指令に基づいてモータ40を駆動するモータ駆動用のアンプであって、異常検出部13は数値制御部11またはモータ制御部12の異常を検出し、モータ減速停止制御部15は異常検出部13からの異常検出信号を受けてモータ40を減速停止させる異常時モータ減速停止制御機能を備えた制御装置。
(もっと読む)
フローティング機構を備えたロボットハンド
【課題】安価で自由度が高く、かつ水平方向及び上下方向のいずれについても高精度の位置決めが可能なフローティング機構を備えたロボットハンドの提供。
【解決手段】ロボットハンド10は、ロボットアーム12の先端部に取り付けられて第1の軸線方向に可動な第1のリニアガイド20と、第1のリニアガイド20に可動に設けられて第2の軸線方向に可動な第2のリニアガイド26と、第2のリニアガイド26に可動に設けられて第3の軸線回りに回転可能な円形の軸受け32と、軸受け32に接続された保持機構34とを有し、第1〜第3の軸線は互いにゼロ度でない角度をなし、ロボットハンド10は第1の軸線及び第2の軸線をいずれも水平にした状態で使用される。
(もっと読む)
ロボットの異常検出機能を有するロボットシステム及びその制御方法
【課題】ロボットに発生した異常を高い感度で検出することが可能なロボットシステム及びその制御方法を提供する。
【解決手段】ロボットシステム11に何らかの異常が発生した場合、位置の相違や応答性の相違によって2つの第1及び第2センサ23、24によって第1及び第2検出値に差が生じる。この差が、予め設定された所定の閾値を超える場合には、制御部13は、ロボットシステム11に何らかの異常が発生したことを検出する。2つの第1及び第2センサ23、24の第1及び第2検出値が相対的に比較されることから、検出値の信頼性が確保され、かつ、第1及び第2検出値の差によって異常状態を判断することができるので、ロボットの動作状態や配置環境の温度変化によるギアや減速機の摩擦力の変動などの不確定要素を排除することができる。検出値の差の閾値を小さく設定することができる。ロボットシステム11は高い感度で異常を検出することができる。
(もっと読む)
モータ制御装置
【課題】交流を直流に変換したのちさらに交流に変換してこれを駆動電力とするモータを、容易に制御できるモータ制御装置を実現する。
【解決手段】モータ51−1および51−2の駆動に関する指令をする数値制御部11と、交流を直流に変換する順変換部12と、数値制御部11による指令に基づき、順変換部12から出力された直流をモータ51−1および51−2の駆動のための交流に変換する逆変換部13−1および13−2と、を備えるモータ制御装置1において、逆変換部13−1および13−2は、数値制御部11および順変換部12と通信する第1の通信手段21を有し、順変換部12は、逆変換部13−1および13−2と通信する第2の通信手段22と、第1の通信手段21および第2の通信手段22を介して数値制御部11から転送された情報に基づいた順変換部12の動作設定に、順変換部12の動作を制御する順変換制御部23と、を有する。
(もっと読む)
衝突防止機能を有するスイッチ装置
【課題】スイッチ本体と操作キーとの衝突を回避することができるスイッチ装置を提供する。
【解決手段】スイッチ装置11では、スライドドア13が閉鎖位置に向かって勢いよく前進した場合に、操作キー18を有する移動体17は受け止め部24に受け止められる。すなわち、移動体17は、ヘッド部23とは別個のブラケット19の突出部24で受け止められる。その結果、操作キー18の前進は規制される。スイッチ本体16に向かう操作キー18の移動は規制される。操作キー18とスイッチ本体16との衝突を確実に回避することができる。このとき、移動体17と受け止め部24との衝突の衝撃は弾性体34で吸収される。その結果、操作キー18はスイッチ本体16に確実に係合することができる。
(もっと読む)
101 - 110 / 1,110
[ Back to top ]