
ファナック株式会社により出願された特許
1 - 10 / 1,110
ダンパ装置のシール構造
Notice: Undefined index: from_cache in /mnt/www/gzt_applicant_list.php on line 189
工具背面での切削点指令により加工を行う数値制御装置
Notice: Undefined index: from_cache in /mnt/www/gzt_applicant_list.php on line 189
薄肉の検出面を有する磁気式エンコーダ
Notice: Undefined index: from_cache in /mnt/www/gzt_applicant_list.php on line 189
停電の有無を判定する停電判定部を有するモータ駆動装置
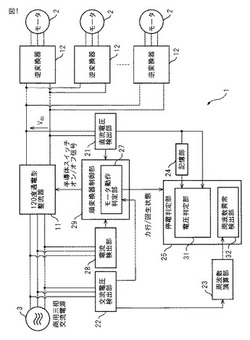
【課題】整流器回生動作中も交流電源側の停電を検出でき、停電の誤検出のないモータ駆動装置を実現する。
【解決手段】モータ駆動装置1は、交流側から供給された交流を直流に変換し、直流側から供給された直流を交流に変換する整流器11と、整流器11が出力した直流を交流に変換してモータ2へ供給し、モータ2からの回生電力を直流に変換して整流器11へ戻す逆変換器12と、整流器11の直流出力電圧を検出する直流電圧検出部21と、整流器11の交流出力電圧を検出する交流電圧検出部22と、検出された交流電圧の周波数を算出する周波数演算部23と、120度通電型整流器11の回生動作開始時点において検出された直流電圧を基準値として記憶する記憶部24と、120度通電型整流器11の回生動作期間中、検出された直流電圧と基準値と算出された交流電圧の周波数とを用いて、整流器11の交流側の停電の有無を判定する停電判定部25とを備える。
(もっと読む)
回転軸に取り付けた超高硬度材を用いた工具を加工するワイヤ放電加工方法およびワイヤ放電加工機

【課題】超高硬度材を固定した切削工具を高精度にかつ容易に加工することができるワイヤ放電加工方法およびワイヤ放電加工機を提供すること。
【解決手段】上ワイヤガイド14に取り付けたタッチセンサ3を、加工プログラムを基に作成された計測用プログラムに従って工具ボディ100にPCDチップ101を固定した被切削工具に対して相対的に水平方向に移動させるX軸およびY軸を駆動し、タッチセンサ3を測定位置に位置決めし(a)、検出子3aの先端3bを、垂直方向に移動するZ軸移動により回転軸の回転中心高さまで降ろして位置決し(b)、切削工具のすくい面が先端3bに接触する方向に回転軸22を回転させ(c)、接触を検出した時点の回転軸座標情報を制御装置50に読み込み、測定用プログラムに従って取得した回転軸座標のデータに基づいて加工プログラムを再生成し、すくい面位置を測定した位置で切削工具を放電加工する。
(もっと読む)
マスタ軸とスレーブ軸との同期制御を行うモータ制御装置
【課題】マスタ軸を駆動するマスタ軸モータとスレーブ軸を駆動するスレーブ軸モータとを正確に同期制御することができる、小型で低価格のモータ制御装置を実現する。
【解決手段】マスタ軸を駆動するマスタ軸モータ14とスレーブ軸を駆動するスレーブ軸モータ54とを同期制御するモータ制御装置1は、マスタ軸の位置データと所定一定周期の基準信号とを出力するマスタ軸位置検出器11と、マスタ軸位置検出器11が出力した位置データと基準信号とを受信するマスタ軸受信回路13と、マスタ軸受信回路13が受信した位置データと基準信号を受信した時点の位置データとの差分を、マスタ軸差分として算出するマスタ軸演算回路13と、マスタ軸差分をマスタ軸モータ14の動作と同期を取るための信号として用いてスレーブ軸モータ54の動作を制御するスレーブ軸モータ制御部55と、を備える。
(もっと読む)
射出成形機の材料供給装置
【課題】組立調整のときに複数の供給スクリュ間の位相が容易に調整可能で、かつ、分解前後での供給スクリュ間の位相の復元が容易な射出成形機の材料供給装置を提供すること。
【解決手段】第1,第2供給スクリュ12a,12bは、接続部材24a,24bを介してモータ30に結合されているギア28a,28bを備えた動力軸26a,26bに連結され、スクリュ溝16aとスクリュ溝16bとが互いに反対向きになるようならせんの溝を持つ構造を有し、スクリュフライト14a,14bが相手側のスクリュ溝16a,16bにせり出すような配置で、それぞれの回転軸を平行に材料供給装置本体10の内部に2本並べて併設され、接続部材24a,24bは、一端に前記供給スクリュまたは前記動力軸と位相を合わせて結合するための位相合わせ部と他端に該動力軸または該供給スクリュと位相が自由な位置で結合可能な結合部を備えた射出成形機の材料供給装置。
(もっと読む)
補助制御装置を備えたレーザ加工システム
【課題】従来、検出装置による異常の検知または加工の完了の検知に基づくレーザ制御指令からレーザ出力の停止までに時間がかかり過ぎるという問題があった。
【解決手段】本発明に係るレーザ加工システムは、レーザ出力信号とデジタル信号とを出力する数値制御装置と、レーザ出力信号をアナログ信号に変換する変換装置と、アナログ信号を制御するパルス信号を生成するパルス信号発生装置と、レーザ光線の送出/停止を強制的に制御する論理信号を生成する補助制御装置と、パルス信号と論理信号との間の論理演算結果を出力する論理演算装置と、論理演算結果に基づいてレーザ出力の送出/停止を交互に行なうレーザ駆動信号を生成するスイッチング装置と、レーザ光線による被加工物からの放射光または反射光の強度を測定する検出装置と、を有し、補助制御装置は検出装置により測定された光の強度に応じて論理信号を生成することを特徴とする。
(もっと読む)
マスキング治具を用いたマスキング装置
【課題】マスキング治具を用いたマスキング作業をロボットにより効率的に行うことができるマスキング装置の提供。
【解決手段】マスキング治具26を第2のロボット20で取り出すステップS5は、ステップS6の前までに完了していればよく、ステップS2が終了するまで、或いはステップS4と並行して行うことができる。第2のロボットによるマスキング治具の取出し作業を、第1のロボットによるワークの検出・取出し又は接着剤の塗布と並行して行うことができるので、サイクルタイムを短縮することができる。
(もっと読む)
産業用ロボットの可動部の回転軸に接続されたサーボモータを駆動するサーボモータ駆動装置
【課題】電源回生機能を産業用ロボットの操作条件に応じて追加することができるサーボモータ駆動装置を提供する。
【解決手段】サーボモータ駆動装置2は、ダイオード209a−1,209a−2,209a−3,209a−4,209a−5,209a−6を有するコンバータ201aと、産業用ロボット3の可動部の回転軸に接続されたサーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを、NPN型トランジスタ210aがオン状態であるときに消費する回生抵抗211aを有する回生抵抗回路202aと、回生エネルギーを三相交流電源1側に回生するコンバータ4を着脱自在に接続するコネクタ203a,204a及び多ピンコネクタ205aと、を有する。
(もっと読む)
1 - 10 / 1,110
[ Back to top ]