
株式会社ワコーにより出願された特許
1 - 10 / 34
力検出機能をもった駆動装置
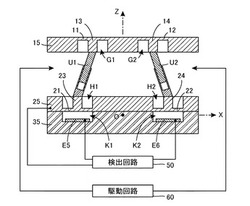
【課題】駆動機能と力検出機能を備えた装置の構造単純化/薄型化を図る。
【解決手段】上方基板15と下方基板25との間に、2本のリニアアクチュエータU1,U2を、互いに逆方向に傾斜するように配置する。アクチュエータU1,U2の上端は、上方膜部11,12を介して上方基板15に接続され、下端は、導電性の下方膜部21,22を介して下方基板25に接続される。上方基板15に右方向の力が作用して右方へスライドすると、U1は寝る方向へ傾いて下方膜部21は上方へ変形し、U2は立つ方向へ傾いて下方膜部22は下方へ変形する。下方膜部21と電極E5による容量素子と、下方膜部22と電極E6による容量素子との容量値の差により、X軸方向の力検出を行う。両容量値の和により、Z軸方向の力検出もできる。アクチュエータU1,U2を伸縮駆動すれば、上方基板15を移動させたり回転させたりできる。
(もっと読む)
角速度センサ

【課題】 小型かつ低価格でありながら、誤差の少ない信頼性の高い検出を可能にする。
【解決手段】 装置筐体30内に、2つの重錘体10A,10Bを収容し、それぞれを可撓性をもった接続部材20によって装置筐体30に接続する。各重錘体10A,10Bは所定の自由度をもって各座標軸X,Y,Zの方向に移動できる。重錘体10A,10B間は、可撓性をもった接続部材25によって相互接続する。各重錘体10A,10Bを互いに逆位相となるようにX軸方向に往復運動させた状態とし、所定の検出時において、各重錘体10A,10Bに作用したZ軸およびY軸方向のコリオリ力をZ軸およびY軸方向への変位として検出する。両重錘体10A,10Bに作用したZ軸およびY軸方向のコリオリ力の差により角速度を求め、和により加速度を求める。
(もっと読む)
変位センサおよび力検出装置
【課題】力・モーメントを独立検出する装置の薄型化を図る。
【解決手段】変位基板10側に電極E11,E12、固定基板20側に電極E21,E22を設け、両基板をバネ31〜34で接続する。E11,E21は、γ軸を中心とした円形電極で、αβ平面上へ投影すると、E21はE11内に包含される。E12,E22は、α軸方向にオフセット配置された矩形電極で、E12のβ軸方向幅は、E22のβ軸方向幅内に包含される。E11,E21間の容量値C1は、変位Dγの情報のみを示し、E12,E22間の容量値C2は、変位DαおよびDγの合成情報を示すので、両者を用いて、変位Dα,Dγを独立検出できる。より広い基板の複数N箇所にローカル原点Qを設定し、それぞれ所定の向きにαβγローカル座標系を定め、それぞれに同様の電極を配置する。各原点Qについての検出値Dα,Dγを統合して、基板全体に作用した力・モーメントを検出する。
(もっと読む)
角速度センサ
【課題】時分割検出動作により3軸まわりの角速度を高い精度で検出する。
【解決手段】XY平面に広がる可撓性支持体の下面中央に振動子を接合し、上面に駆動用素子群と検出用素子群とを配したセンサ本体部300を用意する。動作信号発生器100により、振動子を前半周期にZ軸励振する駆動信号DrZと後半周期にX軸励振する駆動信号DrXを発生し、マトリクス変換器200を介して駆動用素子群に供給する。検出用素子群からの信号により、振動子の各軸方向の変位SΔx,SΔy,SΔzを検出し、これをスイッチSWを介して振動安定期のみAM検波器AMDおよび駆動信号に同期した同期検波器SDに与える。X軸振動の振幅Fxa,位相FxpとZ軸振動の振幅Fza,位相Fzpを動作信号発生器100へ帰還させ、フィードバック制御し、所定の同期検波器SDから出力される信号を3軸の角速度ωx,ωy,ωzとして出力する。
(もっと読む)
力検出装置
【課題】 装置の構造を単純化する。
【解決手段】 図(a) のように、XY平面に平行な上方基板10と下方基板20との間に、第1の柱状体P1と第2の柱状体P2とを配置する。各柱状体P1,P2の上端は、上方膜部11,12を介して上方基板10に接続され、下端は、導電性の下方膜部21,22を介して下方基板20に接続される。各柱状体P1,P2は、垂直基準軸R1,R2に対して、互いに逆方向に傾斜している。図(b) のように、上方基板10に右方向の力+Fxが作用して右方へスライドすると、柱状体P1は寝る方向へ傾いて下方膜部21は上方へ変形し、柱状体P2は立つ方向へ傾いて下方膜部22は下方へ変形する。下方膜部21と電極E5とによる容量素子と、下方膜部22と電極E6とによる容量素子との容量値の差により、X軸方向の力Fxの検出を行う。両容量値の和により、Z軸方向の力Fzの検出もできる。
(もっと読む)
力検出装置
【課題】 構造を単純化し、他軸成分の干渉を排除し、力とモーメントとを区別して検出する。
【解決手段】 支持基板300上のX軸の正負およびY軸の正負の4カ所の円形領域に、電極E1〜E8,F1〜F8を形成する。各円形領域の上方には、所定距離をおいて、導電性可撓性肉薄円板を配置し、対向電極との間で容量素子を形成する。各肉薄円板の上面中央には柱状体の下端を固定し、各柱状体の上端には受力体を取り付ける。受力体に力が作用すると、4本の柱状体が傾斜したり、上下に変位したりして、各容量素子の静電容量値が変化する。電極E1〜E8によって構成される主容量素子の静電容量値の変化に基づき、各座標軸方向の力Fx,Fy,Fzと各座標軸まわりのモーメントMx,My,Mzとを検出する。このとき、電極F1〜F8によって構成される副容量素子の静電容量値の変化に基づき、他軸成分の干渉を相殺する。
(もっと読む)
角速度センサ
【課題】 振動ジャイロ式の角速度センサにおいて、コリオリ力の検出感度を高める。
【解決手段】 外寸ξ1のシリコン基板の下面に、外径φ1,内径D1の円環状の溝Gを堀り、この溝Gで取り囲まれた内側部分に、直径D1、高さHの円柱状の振動子120を形成する。溝Gの上方のダイアフラム部110は、可撓性をもち、その外周部は台座130によって装置筐体に固定される。振動子120は、ダイアフラム部110によって変位自在に支持される。ここで、寸法比φ/Hの値が「2.25 ≦ φ/H ≦ 2.54」なる条件を満たすように設定すると、他の部分の寸法にかかわらず、振動子120の水平方向振動の共振周波数と垂直方向振動の共振周波数とが近似し、コリオリ力の検出感度が著しく向上する。
(もっと読む)
力検出装置
【課題】単純な構造により、力とモーメントとを区別して検出する。
【解決手段】検出対象となる力を受ける受力体100の下方に支持体300を配置し、両者間に4本の柱状力伝達体T1〜T4を接続する(T1,T2はT3,T4の奥に配置される)。各柱状力伝達体T1〜T4の上下両端には、可撓性をもった接続部材135,145,235,245を介挿し、受力体100が力を受けて変位したときに、柱状力伝達体T1〜T4が傾斜したり、上下に変位したりできるようにする。各柱状力伝達体T1〜T4の傾斜および上下方向への変位は、電極E31〜E35,E41〜45と導電性の接続部材235,245によって構成される容量素子センサS1〜S4で検出される。これらセンサの検出値に基づいて、受力体100に作用した力Fx,Fy,Fzと、モーメントMx,My,Mzのすべてが求められる。
(もっと読む)
力検出装置
【課題】 容量素子を用いた閉ループ式の力検出装置において、単純な制御系を用いつつ、高精度な検出結果を得る。
【解決手段】 筐体内に可撓性接続部材を介して導電性の作用体310を変位自在に取り付ける。上方固定電極E1との間の静電容量値C1と、下方固定電極E2との間の静電容量値C2と、を測定する。制御ユニット50は、電極E1に電圧V1を印加したり、電極E2に電圧V2を印加したりして、作用体310に上下方向へのクーロン力を作用させる。このとき、容量差ΔC=C1−C2が0になるように、印加電圧差ΔV=V2−V1を調整するフィードバック制御を行い、作用体310を基準位置d0近傍に維持する。所定時点におけるΔVとΔCとを用いて、D(α)=ΔV+k・ΔC(但し、kは比例係数)なる演算で得られた値D(α)を、上下方向に作用した力(加速度)の検出値として出力する。
(もっと読む)
力検出装置
【課題】単純な構造により、力とモーメントとを区別して検出する。
【解決手段】板状の支持体300の上面の3箇所に、それぞれ5組ずつの固定電極群E11〜E15,E21〜E25,E31〜E35を配置する。この3箇所の固定電極群の上方にそれぞれ変位電極として機能する円盤状のダイアフラムを配置し、その周囲を支持体300上に固定する。3枚のダイアフラムの上面中央部に、それぞれ上方に伸びる柱状体を接合し、この3本の柱状体の上端に、検出対象となる力を受ける受力体を取り付ける。受力体に力やモーメントが作用すると、3本の柱状体が変位し、各ダイアフラムに撓みが生じる。各固定電極E11〜E35と対向するダイアフラムとによって構成される15組の容量素子の静電容量値の変化に基づいて、受力体に作用した各座標軸方向の力Fx,Fy,Fzと、モーメントMx,My,Mzのすべてが検出できる。
(もっと読む)
1 - 10 / 34
[ Back to top ]