
三星電子株式会社により出願された特許
31 - 40 / 8,520
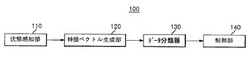
ロボット及びその制御方法
【課題】ハンドの関節に発生するトルク及びハンドの様子を特徴データとする分類器を用いることによって、触覚センサーを用いずとも、ロボットが物体を把持しているか否かを正確に検出できるロボット及びその制御方法を提供する。
【解決手段】ロボットは、該ロボットの状態を感知する状態感知部と、該状態感知部から特徴データを抽出し、該特徴データを用いて特徴ベクトルを生成する特徴ベクトル生成部と、該特徴生成部で生成した特徴ベクトルを用いて前記ロボットの動作状態を判断し、その判断結果を出力する学習ベースのデータ分類器と、を備える。
(もっと読む)
3次元半導体装置

【課題】増加された集積度を有し且つ高密度で高速の3次元(抵抗性)半導体(メモリ)装置を、最小限のマスク工程数で提供する。
【解決手段】チャンネル領域によって分離された第1及び第2不純物領域を含む基板、前記第1不純物領域に接続するビットライン、前記第2不純物領域に接続する垂直電極、前記基板と前記ビットラインとの間に配置される水平電極の積層体、及び、前記積層体と前記基板との間に配置される選択ラインを含む。この時,前記選択ラインは平面形状及び平面位置において、前記水平電極の各々と実質的に同一であり得る。
(もっと読む)
視線追跡に基づくユーザ機能運用方法及びこれを支援する端末機
【課題】視線追跡に基づくユーザ機能運用方法及びこれを支援する端末機を提供する。
【解決手段】本発明の視線追跡に基づくユーザ機能運用方法は、特定のユーザ機能を遂行するステップと、ユーザ機能が維持された状態でカメラ部を活性化するステップと、カメラ部が収集した映像で瞳の視線角度情報を取得するステップと、瞳の視線角度情報により、ユーザ機能の状態を変更するか又は現在の状態を維持するように制御する視線追跡機能を遂行するステップと、を有する。
(もっと読む)
音声信号送信装置、音声信号受信装置及びその方法
【課題】多チャネルの音声信号を圧縮する前に、基準音声信号を基準として基準音声信号以外の音声信号の容量を減少させて、圧縮効率を高めることができ、時間も減らすことができる。また、無損失圧縮を基準に1%乃至3%の圧縮効率を得ることができる音声信号送信装置及びその方法を提供する。
【解決手段】複数のマイクからの音声信号をそれぞれ抽出する抽出部、多チャネルの音声信号のパワーをそれぞれ算出し、多チャネルの音声信号のうちいずれか一つの音声信号を基準音声信号に設定するパワー算出部、基準音声信号に基づいて、基準音声信号以外の音声信号の同期を調節する同期調節部、同期が調節された基準音声信号以外の音声信号から基準音声信号をそれぞれ相殺させて、抽出信号をそれぞれ生成する信号生成部、基準音声信号とそれぞれの抽出信号を圧縮する信号圧縮部、圧縮された基準音声信号とそれぞれの抽出信号とを送信する送信部、を含む。
(もっと読む)
携帯端末機におけるデバイス接続装置及び方法
【課題】携帯端末機におけるデバイス接続装置及び方法に関し、特に、携帯端末機の通信モードで所望するデバイスにより便利に接続する携帯端末機におけるデバイス接続装置及び方法を提供する。
【解決手段】携帯端末機におけるデバイス接続装置は、特定のデバイスとの接触を介して通信接続のためのデバイス情報を交換する近距離通信モジュールと、前記近距離通信モジュールを介して前記交換されるデバイス情報に基づいて特定のデバイスへの通信を接続するように前記近距離通信モジュールを制御する制御部とを有する。
(もっと読む)
銅箔積層板及びその製造方法
【課題】耐電圧測定に十分な絶縁距離を確保することができ、耐電圧を所望の水準に上げて耐電圧測定を行うことができる銅箔積層板及びその製造方法を提供する。
【解決手段】本発明の銅箔積層板は、金属板と、金属板より広い平面積を有して金属板上に積層される絶縁層と、絶縁層上に積層される銅箔と、を有し、絶縁層は、側面が金属板の側面から外側に更に伸びて金属板の外側面と銅箔の外側面との間を絶縁させる絶縁距離を形成する。
(もっと読む)
低電力シャッタラグ除去方法、カメラモジュール及びそれを備えたモバイル機器
【課題】低電力シャッタラグ除去方法、カメラモジュール及びそれを具備するモバイル機器を提供する。
【解決手段】シャッタラグ除去方法は、カメライメージセンサのプレビュモードでセンサ出力イメージを低解像度に設定し、キャプチャ準備信号に基づいてセンサ出力イメージを高解像度に変更してカメライメージセンサをキャプチャ準備モードに進入させ、及びキャプチャ準備モードでキャプチャ信号に応答してセンサ出力イメージをキャプチャする。この時、低解像度は基準解像度と同一であるか、または、基準解像度より低い解像度であり、高解像度は基準解像度より高い解像度である。
(もっと読む)
撮像装置、及び撮像装置における制御方法
【課題】ベストフォーカス位置を通り過ぎて戻す操作をしなくても容易に合焦させることが可能なマニュアルフォーカスの補助機能を提供すること。
【解決手段】複数の異なるフォーカス位置における撮像画像から合焦状態を検出し、合焦フォーカス位置と合焦近傍度合いとを算出する合焦評価手段と、撮影者のマニュアルフォーカス操作の状態を検出する状態検出手段と、を有し、前記合焦評価手段が算出した合焦近傍度合いと前記状態検出手段が検出したマニュアルフォーカス操作の状態とに応じて前記合焦状態を検出するためのフォーカス制御を異ならせる、撮像装置が提供される。
(もっと読む)
メガネ及びメガネのペアリング方法
【課題】 本発明の目的とするところは、メガネの駆動のための伝送パケットが受信されなければ、ディスプレイ装置と自動的にペアリングを行うためのメガネ及びメガネのペアリング方法を提供することにある。
【解決手段】 メガネのペアリング実行方法が開示される。本メガネのペアリング実行方法は、予め設定されたイベントが発生すると、ディスプレイ装置から前記メガネの駆動のための伝送パケットが受信されるか否かを判断するステップと、前記伝送パケットが受信されなければ、前記ディスプレイ装置と自動的にペアリングを行うステップとを含む。
(もっと読む)
ビームフォーミング装置及び方法、これを行う医療画像システム、並びにコンピュータで読取可能な記録媒体
【課題】高解像度の診断画像をより少ない演算量で生成できるビームフォーミング装置及び方法、並びにこれを行う医療画像システムを提供する。
【解決手段】ビームフォーミング装置100は、既測定のエコー信号のビームフォーミング係数から獲得された複数の基底ベクトルを保存する保存部110と、保存された複数の基底ベクトルを利用して、被写体から反射されたエコー信号に適用される加重値を算出する加重値算出部120と、保存された複数の基底ベクトルを利用して、被写体から反射されたエコー信号に算出された加重値を適用し、加重値が適用された信号を合成する合成部130と、を備える。
(もっと読む)
31 - 40 / 8,520
[ Back to top ]