
キャタピラー インコーポレイテッドにより出願された特許
21 - 30 / 296
機械の生産性を最大化するとともに最終勾配を保つように器具を制御するためのシステムおよび方法
開示は、一態様において、器具に動作的に接続されたコントローラを含む器具制御システムを記載している。コントローラは、第1の信号および第2の信号を、器具と動作的に通信するシステムから受信するように適合されている。第1の信号は、所望される負荷制御状態を示し、第2の信号は、所望される勾配制御状態を示す。コントローラは、さらに、第1の信号に関連付けられた第1の比較可能な特性を有する第1の目標位置を決定するとともに、第2の信号に関連付けられた第2の比較可能な特性を有する第2の目標位置を決定するように適合されている。また、コントローラは、第1の比較可能な特性および第2の比較可能な特性に部分的に基づいて、器具を第1の目標位置または第2の目標位置に移動させる制御信号を生成するように適合されている。 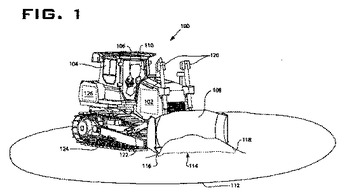 (もっと読む)
(もっと読む)
ソレノイド電機子の移動を検知するシステムおよび方法
ソレノイドに付随する電機子の作動を検知する方法は、ソレノイドに付随するソレノイドコイルに電位を提供するステップを含む。本方法はまた、ソレノイドコイル内を流れる電流を測定するステップを含む。本方法は更に、測定された電流が所定の最大値に達した場合、電位をスイッチオフするステップを含む。本方法はまた、測定された電流が所定の最小値に達した場合、電位をスイッチオンするステップを含む。本方法は更に、電位のオン/オフを切り替えるパルス間のチョップ時間を測定するステップを含む。本方法はまた、一連のチョップ時間を解析して電機子の移動および電機子のシーティングを検知するステップを含む。本方法は更に、チョップ時間の比較に基づいて、ソレノイドに付随する電機子の引き込み時間を判定するステップを含む。 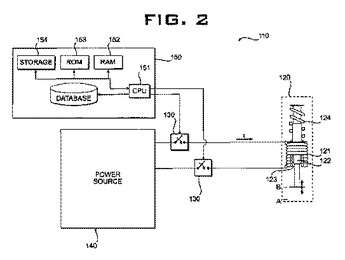 (もっと読む)
(もっと読む)
還元剤を排気ガス流に導入する方法
還元剤を排気ガス流(16)に導入する方法が開示される。方法は、第1の添加イベントの実行を命令することと、第1の添加イベントの実行命令に応じて、還元剤を取り出し装置(32)に供給することと、還元剤を取り出し装置(32)から排気ガス流(16)に投入することと、還元剤を取り出し装置(32)から還元剤源(30)に向けて押し出すこととを含んでもよく、充分な還元剤が、ポンプ装置(28)および流体路(34)内に残り、ポンプ装置(28)を満たされた状態に保つ。 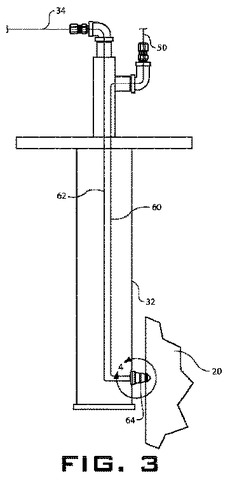 (もっと読む)
(もっと読む)
フィルタ清浄ツールおよび方法
ディーゼル粒子フィルタ(DPF)から粒子状物質を除去するツールは、開口端を有するチャンバを画定する容器と、DPFの第1の軸方向端部を支持し、DPFの缶の外側面と容器とのまわりにシールを形成する、開口端に連結された支持体とを含む。DPFの第2の軸方向端部に近接して取り付けられた空気ノズルは、空気の細流をDPFに通し、空気の細流は、DPF要素束の一部を通り、第1の軸方向端部から出て容器に至る。 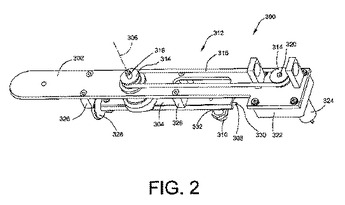 (もっと読む)
(もっと読む)
パラメータ可視化システム
作業現場上の土工機械の位置を示す三次元位置データを受信し、複数のパラメータの値を含むパラメータ情報を受信するように構成された制御装置を含むパラメータ可視化システムが開示される。複数のパラメータは土工機械と作業現場のうちの少なくとも1つのパラメータを含む。制御装置はさらに、複数のパラメータ内の第1のパラメータの値を提供するように構成された第1の表示信号を生成し、第1のパラメータの値の変更を受信し、第1のパラメータの値の変更に基づき第2のパラメータの値を計算し、作業現場の三次元視覚的描写に沿って第1のパラメータまたは第2のパラメータの少なくとも1つの値の視覚的描写を提供するように構成された第2の表示信号を生成するように、構成される。 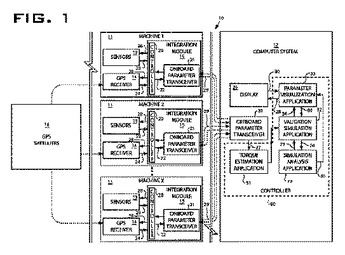 (もっと読む)
(もっと読む)
斜板ポンプ用制御システム
油圧システム用のポンプ(10)が開示される。ポンプは、傾斜可能な斜板(28)と、斜板を傾けるために移動可能な少なくとも1つのアクチュエータ(34)と、加圧流体供給部(42)と、ドレーン(52)とを有することができる。ポンプはまた、加圧流体供給部およびドレーンに接続可能であり、少なくとも1つのアクチュエータの動作を制御するように構成された第1の回路(48)と、加圧流体供給部およびドレーンに接続可能であり、少なくとも1つのアクチュエータの動作を制御するように構成された第2の回路(50)とを有することができる。ポンプは、通常運転状態時に、第1の回路を供給部およびドレーンに接続し、フェイルセーフ状態時に、第2の回路を供給部およびドレーンに接続するように構成された弁(58)をさらに有することができる。 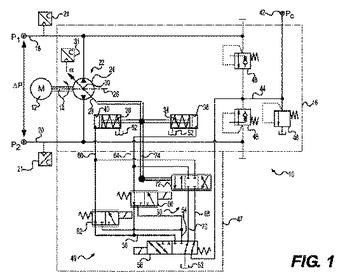 (もっと読む)
(もっと読む)
エンジン出力損失の補償

【課題】エンジン出力損失の補償を提供する。
【解決手段】エンジン内での燃料の送出に関連するパラメータを決定する方法および装置。本方法および装置は、燃料の送出に関連する初期パラメータ値を決定することと、燃料および燃料供給装置の加熱効果に基づいて、少なくとも1つの補償要因を決定することと、少なくとも1つの補償要因を初期パラメータ値に当てはめて、補償されたパラメータ値を導き出すこととを含む。
(もっと読む)
自動降坂速度制御システム
機械の降坂速度を自動的に制御する方法。この方法は、現在の機械速度に基づいて目標機械速度を決定するステップと、勾配が所定の閾値より大きいこと、等の少なくとも1つのトリガ条件が満たされたか否かを判断するステップと、を含む。条件が満たされた場合、この方法は、制御システムを有効化して、パワートレインリターダとトランスミッションギアチェンジのうちの少なくとも一方を制御して、目標機械速度の超過を防止する。  (もっと読む)
(もっと読む)
トラック付きアンダーキャリッジ用ブッシング
トラック式機械のトラック付きアンダーキャリッジにおいて用いるためのブッシングは、第1端と、第1端に対向して配設された第2端とを含む。外面は、第1端と第2端との間に延在し、トラック付きアンダーキャリッジのスプロケットに係合するように成形されている。ブッシングは、また、第1端と第2端との間に配設されトラックピンを受けるように成形された内部キャビティを定義する環状の内面を含む。内面の最も内側の部分は、(PL2)/[(24EπDRBush4)(1−cos[(PL)/(16EπDRBush4))]以下の半径を有するクラウンを形成し、式中、Lはブッシングの長さ、Pはトラック式機械の重量、Eはブッシングの弾性率、RBushは環状内部キャビティの最も内側の部分の半径である。 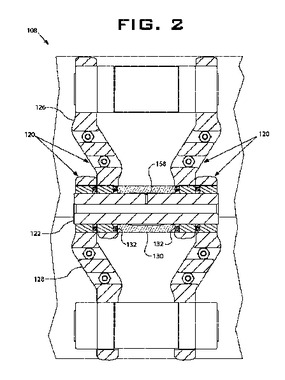 (もっと読む)
(もっと読む)
ポンプを制御する方法および装置
ポンプ(22)制御のための電気油圧制御システムが開示される。油圧アクチュエータ(50)は、斜板の勾配を制御するように構成される。油圧アクチュエータ(50)の位置は、それぞれがアクチュエータ(50)のいずれかの側の2つの圧力室(54と56)の中へ(から外へ)の加圧流体の流出を制御することにより制御される。流体通路(62)は、通路をタンク(40)へ選択的に接続するように備えられる。通路は、各圧力室(54および56)のためのオリフィス(68と70)を有している。アクチュエータ(50)は、アクチュエータ(50)の位置に依存して、オリフィス(68および70)の1つ以上のすべてまたは一部を選択的に遮断するように構成される。制御システムの構成要素は、アクチュエータ(50)が電力のロスに際してニュートラルまたはニュートラルに近い位置に戻るように構成される。 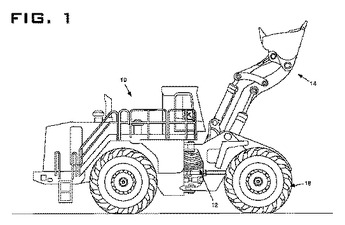 (もっと読む)
(もっと読む)
21 - 30 / 296
[ Back to top ]