
キャタピラー インコーポレイテッドにより出願された特許
61 - 70 / 296
二重給電軸方向磁束誘導発電機
二重給電軸方向磁束誘導発電機(12)は、機械エネルギーを供給するように構成された原動機(20)を備えていてもよい。二重軸方向磁束誘導発電機(12)はまた、原動機(20)に連結されたロータアセンブリ(24、26)を備えていてもよく、原動機(20)はロータアセンブリ(24、26)を回転させるように構成される。二重給電軸方向磁束誘導発電機(12)はさらに、ステータ(28)を備えていてもよい。二重給電軸方向磁束誘電発電機(12)はさらにまた、ロータアセンブリ(24、26)とステータ(28)に連結されたパワーエレクトロニクスモジュール(30)を備えていてもよく、パワーエレクトロニクスモジュール(30)は、原動機(20)と並列に配置され、機械エネルギーから電気エネルギーへの変換および、原動機(20)とエネルギー貯蔵装置(32)の間の配電を支援するように構成されている。エネルギー貯蔵装置(32)はパワーエレクトロニクスモジュール(30)と連結されていてもよく、電力需要の変動に対応できるように構成されていてもよい。  (もっと読む)
(もっと読む)
方向シフト管理型の機械制御システム
パワー系統(16)を動作させるための方法が提供される。この方法は、推進方向変更のための操作者要求を受信することを含む。この方法はまた、推進方向変更要求に応答して出力増大マップを選択することを含む。出力増大マップは、パワー系統の動力源(34)の出力定格を増大させる。加えて、この方法は、動力源に動力を向けることを含む。この方法はさらに、動力をこれ以上動力源に向けない場合に、出力増大マップに従ってパワー系統を制御しかつ動力源の速度を加速させることを含む。 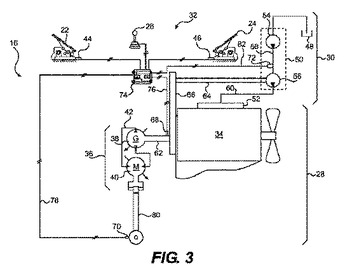 (もっと読む)
(もっと読む)
移動機械により移動される経路を決定する方法および装置
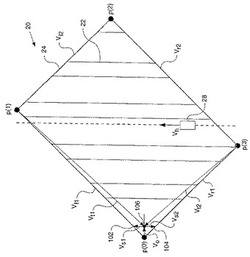
【課題】移動機械の後続する経路の始点および終了点を計算するために用いられる左および右境界のベクトルを決定する。
【解決手段】連続する経路(22)の終了点(104)は、平行するラインに沿って作業経路(22)の幅分の距離を増すことにより見出される。Vt1とVs1とのベクトル外積が計算され、ベクトル外積の符号が、次の経路の始点および終了点を計算するのに用いるべく、左および右境界のベクトルVlおよびVrを決定するために用いられる。仮に、Vt1とVs1とのベクトル外積の符号が負であれば、角地点P(0)およびP(1)の間の境界ベクトルVl1が用いられる。仮に、ベクトル外積の符号が正であれば、角地点P(1)およびP(2)の間の境界ベクトルVl2が用いられる。
(もっと読む)
適応型ペイロード監視システム
掘削機(10)のペイロード監視システム(50)が開示される。このペイロード監視システムは、ツール(16)と、ツールの速度を示す第一の信号を生成するように構成された第一のセンサ(64)と、ツールの持ち上げ力を示す第二の信号を生成するように構成された第二のセンサ(62B)を有していてもよい。ペイロード監視システムはまた、第一のセンサと第二のセンサと通信するコントローラ(60)を備えていてもよい。コントローラは、第一と第二の信号に基づいて、1作業サイクル中のツールの速度と持ち上げ力を記録し、この作業サイクルを、積載状態移動区間を含む複数の区間に分割するように構成されていてもよい。コントローラはまた、積載状態移動区間内の、ツールの速度が略一定である期間を特定し、その期間中に記録された持ち上げ力に基づいて、ツールのペイロードを計算するように構成されていてもよい。  (もっと読む)
(もっと読む)
旋回モータの運動エネルギを回生する制御システム
本開示は、旋回モータ(11)の動作によって発生した運動エネルギを油圧のポテンシャルエネルギに変換し、旋回モータ(11)を加速するために、油圧のポテンシャルエネルギを再利用する油圧システムおよび方法に関する。機械(4)の上側構造体(6)が運動することで可動旋回モータ(11)に作用する慣性トルクによって加圧された、旋回モータ(11)からの排出オイルを蓄積するために、アキュムレータ(88)を設けることができる。アキュムレータ(88)内の加圧オイルを再利用して、加圧オイルを旋回モータ(11)に供給することによって、旋回モータ(11)を加速することができる。  (もっと読む)
(もっと読む)
モータシステムのクリープ制御
機械(10)用の制御システム(23)が開示される。制御システムは、電気モータ(16)と、モータの出力に連結されたトラクション装置(18)とを有し得る。制御システムはまた、減速器(28)と制御装置(24)とをさらに有し得る。制御装置は、モータ及び減速器と通信し得る。制御装置は、クリープトルクを決定し、減速器の作動時であってもトラクション装置にクリープトルクを付加するように構成され得る。  (もっと読む)
(もっと読む)
トランスミッションシフトダウン制御システム
選択的に係合する際に複数の出力比をもたらすように構成された複数のギアを有するトランスミッションを有する、機械用のパワートレインを提供する。パワートレインは、シフトダウン事象中に出力ギア比の無効化を必要とする状態を示す少なくとも1つのパラメータを検知するように構成された少なくとも1つのセンサも有する。さらに、パワートレインは、少なくとも1つのパラメータに応じて、トランスミッションを第1モードまたは第2モードのいずれかに調節するように構成されたコントローラを有する。コントローラがトランスミッションを第1モードに調節している間に発生するシフトダウン事象中は、出力ギア比のうちの少なくとも1つが無効になる。さらに、コントローラがトランスミッションを第2モードに調節している間に発生するシフトダウン事象中は、すべての出力ギア比が有効である。 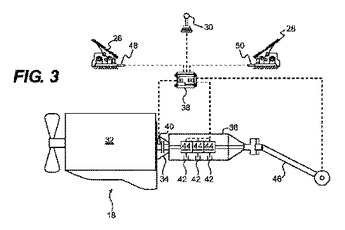 (もっと読む)
(もっと読む)
過渡負荷用補助装置を備えた複合エンジンシステム
動力出力を生成する動力源(16)を有する駆動伝達系(14)が提示される。駆動伝達系はまた、動力を蓄積し、これを配給する動力貯蔵装置(22)を有する。駆動伝達系はさらに、動力源に流入した燃料の比率がしきい値燃料率よりも大きい場合に、動力源を補助するために動力貯蔵装置から動力を配給させるように構成されたコントローラ(24)を有する。しきい値燃料率とは、動力源を補助することで駆動伝達系の効率が高くなる燃料率である。  (もっと読む)
(もっと読む)
ハイブリッドエネルギシステムを制御するシステム
ハイブリッド動力システム(10)を制御するシステムは、少なくとも1つの非トラクション負荷(18)を含む。少なくとも1つの非トラクション負荷部(18)の繰り返し動作を示す第1の動作シーケンスが特定され、かつそれは、複数の時間増分で構成される。第1および第2のパラメータは、それぞれ、少なくとも1つの非トラクション負荷部(18)の要求動力および出力動力を示す。第1のシーケンスの複数の時間増分で求められ、構成される。第3のパラメータは、少なくとも1つの非トラクション負荷部(18)で回生された動力を示す。第1のシーケンスの複数の時間増分で求められ、監視される。非トラクション負荷部(18)に関係する動力の不足または超過の少なくとも一方であると判断される。動力不足は、第1および第2のパラメータによって決まり、動力超過は、第3のパラメータによって決まる。第2の動作シーケンスの少なくとも一部中に貯蔵装置(14)に蓄積されるng動力は、動力の不足または超過に応じて調整される。第2の動作シーケンスは複数の時間増分で構成される。  (もっと読む)
(もっと読む)
回転力を補償する積載質量システム
本開示は、動作部(18)と共に使用する積載質量計算システム(42)に関する。積載質量計算システムは、動作部の状態を測定するように構成された状態センサ(44)を有し得る。積載質量計算システムはさらに、動作部によって動かされる積載量の質量を計算するように構成された処理装置(48)を有し得る。処理装置は、垂直旋回軸(19)の周りで回転する動作部によって引き起こされる、動作部の遠心力、慣性力、および摩擦力に関する質量の計算を補償するため、測定された状態を使用するように構成され得る。  (もっと読む)
(もっと読む)
61 - 70 / 296
[ Back to top ]