
キャタピラー インコーポレイテッドにより出願された特許
71 - 80 / 296
重心の補償を備える積載質量システム
本開示は、少なくとも2つのリンク部材(24)を有する動作部(18)と共に使用する積載質量計算システム(42)に関する。積載質量計算システムは、少なくとも2つのリンク部材の状態を測定するために構成される、少なくとも1つの状態センサ(44)を有し得る。積載質量計算システムはまた、少なくとも1つの状態センサと通信する処理装置(48)も有し得る。処理装置は少なくとも2つのリンク部材の各々の重心の変化を明らかにし得る。処理装置また、動作部によって動かされた積載量の質量を決定するため、少なくとも1つの状態センサを用いるように構成され得る。 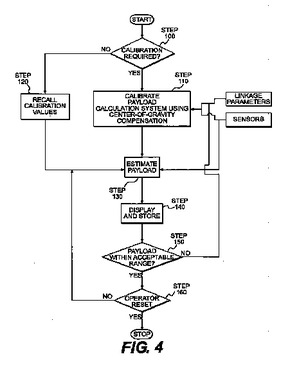 (もっと読む)
(もっと読む)
無段変速機用の動的制御装置
被駆動素子を有する無段変速機(30)を提供する。無段変速機はまた、第1の操作者入力装置の変位に対応する第1の変位信号を送信するように構成された第1の操作者入力装置(22)を有する。無段変速機はさらに、第2の操作者入力装置の変位に対応する第2の変位信号を送信するように構成された第2の操作者入力装置(24)を有する。さらに、無段変速機は変速機動作モード要求を送信するよう構成された第3の操作者入力装置(26)を有する。さらに、無段変速機は、変速機の動作条件を示す少なくとも1つのパラメータを感知するように構成された少なくとも1つのセンサー(46)を有する。さらに、無段変速機は、動作要求モード、第1の変位信号、第2の変位信号、および少なくとも1つの感知されたパラメータに基づいて被駆動素子出力要求を決定するように構成された制御装置(32)を有する。制御装置はまた、動作モード要求、被駆動素子出力要求、および少なくとも1つの感知されたパラメータに応答して被駆動素子の出力を規制するように構成される。 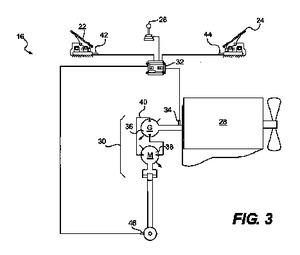 (もっと読む)
(もっと読む)
統合電力制御のための装置と方法
発電装置(22)により生成される電力を分配する方法は、発電装置(22)により生成することができる利用可能電力を判断する工程を含み得る。本方法はまた、電力変換装置(20)から電力要求を取得する工程と、利用可能電力と電力要求とを比較する工程と、電力変換装置(20)に分配するための利用可能な電力の量を判断する工程とを含み得る。本方法は、電力変換装置(20)から動作条件要求を取得する工程と、発電装置(22)が動作すべき動作条件を決定する工程とをさらに含み得る。 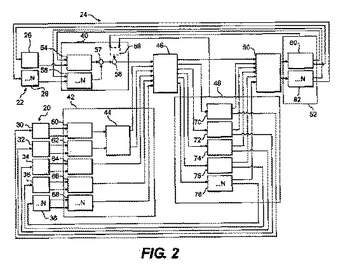 (もっと読む)
(もっと読む)
流体フィルタシステム
エンドキャップは、半径方向内側部分および半径方向外側部分を備え、且つ長手軸を画定する第1プレート部材を備えている。エンドキャップはまた、第1プレート部材の半径方向内側部分と半径方向外側部分との間に配置され、且つ第1方向に長手軸に沿って軸方向に突出するフランジを備えている。エンドキャップはまた、フランジに隣接して配置された第1シール部材を備えている。第1シールは、第1プレート部材の軸方向に面する表面と係合するその第1部分、およびフランジの半径方向に面する表面と係合するその第2部分を備えている。エンドキャップはさらに、半径方向外側部分の半径方向外側に配置された第2プレート部材、および第1方向とは反対側の長手軸に沿って第2方向に、第1プレート部材の軸方向に面する表面から軸方向に離間したその少なくとも一部を備える第2プレート部材に隣接して配置された第2シール部材を備えている。  (もっと読む)
(もっと読む)
斜板油圧ポンプまたは斜板油圧モータの軸受制限装置
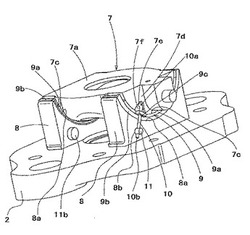
【課題】斜板油圧ポンプまたは斜板油圧モータの軸受制限装置を提供する。
【解決手段】円弧面が、円弧経路に従う円周方向に揺動することを可能にするように、斜板の背面の凸状の円弧面が軸受を介して斜板支持部の凹状の円弧面に支持されるべく構成された斜板油圧ポンプまたは斜板油圧モータ。軸受の移動を制限するための制限ピンが含まれる。組立構造により、制限ピンが斜板と斜板支持部とから外れることが防止される。制限ピンの一端は斜板の側面に回転可能に支持される。制限ピンの中間部は、軸受のホルダに形成された係合孔に緩く嵌合して係合される。最後に、ピン軸方向への制限ピンの移動を許容するために、制限ピンの他端が、支持ロッドの軸を中心として斜板支持部に回転可能に支持された前記支持ロッドに挿入される。
(もっと読む)
ショベルのブーム旋回動力管理を含む電動油圧回路およびシステムのための方法
より効率的なエンジン動作を達成するために、可変容量形ポンプを駆動するエンジンと、油圧弁と、油圧アクチュエータとを有する電動油圧系を制御する方法を開示する。電動油圧系における圧力が監視され、油圧アクチュエータの所望の移動を示すコマンドが受け取られる。圧力およびコマンドに基づいて、機械が行っている動作が確定され、エンジンが、機械動作の特定の部分に対して効率的な設定に設定される。 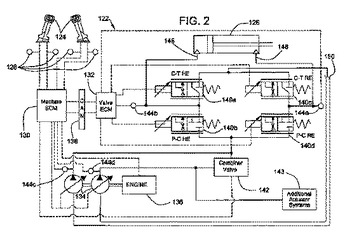 (もっと読む)
(もっと読む)
用具を作業機械のフレームに連結するためのリンクアセンブリ
リンクアセンブリ(122)は、リンクアセンブリのリフトアーム(124)と後部傾斜レバー(184)とを回転可能に連結するようにカートリッジを含む軸に沿って配置されるピボットピンカートリッジ(142)を有する。ピボットピンカートリッジは、ピン(212)と、ピンの少なくとも一部のまわりに回転可能に配置された少なくとも1つのブッシュ(210)と、ピンのまわりでブッシュの少なくとも一部内に浮動するように配置された一対のスリーブベアリング挿入体(220)とを含む。後部傾斜レバー(184)は、ピンのまわりに回転するようにブッシュ(210)に連結され、一方、リフトアームのサイドプレート対(138、138)の少なくとも一方はピボットピンに連結される。 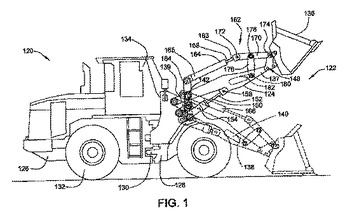 (もっと読む)
(もっと読む)
連続可変トランスミッションを有する推進システム
開示される一実施形態は、機械(10)の推進システム(12)に関する。推進システムは、連続可変トランスミッション(28)を通して推進装置(20)に動作可能に接続された原動機(18)を含み得る。推進システムは、操作者入力に基づいて動作パラメータを調整することを含み得る、連続可変トランスミッションの動作パラメータを制御する推進システム制御機構(24)も含み得る。動作パラメータを制御することは、1つまたは複数の動作状況に基づいて動作パラメータの調整限度を決定し、1つまたは複数の動作状況に基づいて、その調整限度を動作パラメータに適用して、機械の加速およびジャークのうちの少なくとも一方を変更することも含み得る。 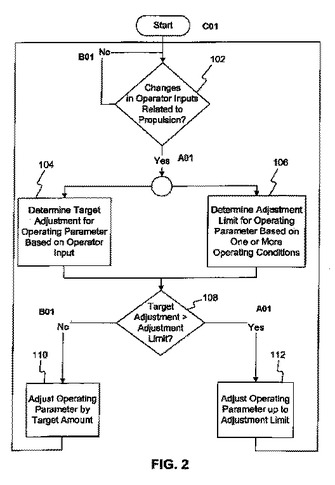 (もっと読む)
(もっと読む)
コンバイナ弁制御システムおよび方法
機械(10)用の油圧制御システム(48)が開示される。この油圧制御システムは、第1流体アクチュエータ(26)と、加圧流体の第1の流れを生成するように構成される第1ポンプ(51)と、第2流体アクチュエータ(32)と、加圧流体の第2の流れを生成するように構成される第2ポンプ(53)とを有することができる。この油圧制御システムは、さらに、コンバイナ弁(108)と、制御器(112)とを有することができる。制御器は、第1流体アクチュエータに対する所望速度を示す操作者入力を受け取り、その所望速度に対応する第1流体アクチュエータ用の流量を決定し、かつ、第1ポンプの流量容量を決定するように構成することができる。制御器は、また、第1流体アクチュエータ用として決定された流量が第1ポンプの決定された流量容量よりも大きい場合には、コンバイナ弁を動かして、加圧流体の第2の流れを加圧流体の第1の流れと結合するように構成することができる。 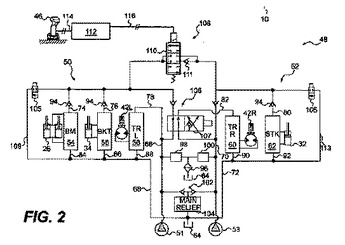 (もっと読む)
(もっと読む)
運搬道路を設計するためのシステムと方法
機械性能に基づき運搬道路を設計する方法は、1つまたは複数の運搬道路パラメータを受信する工程(310)と、運搬道路上で操作される少なくとも1種類の機械を特定する工程(320)と、を含む。本方法はまた、少なくとも1種類の機械に関連する少なくとも1つの目標動作パラメータを選択する工程(330)と、少なくとも1つの目標動作パラメータに対応する動作値を予測するために少なくとも1種類の機械の性能をシミュレートする工程(340)と、を含む。対応する目標動作パラメータの閾値範囲内に予測動作値がない場合、1つまたは複数の運搬道路パラメータを調整する(360)。 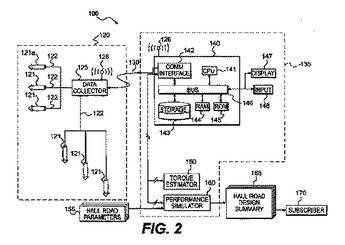 (もっと読む)
(もっと読む)
71 - 80 / 296
[ Back to top ]