
キャタピラー インコーポレイテッドにより出願された特許
81 - 90 / 296
コンバイナ弁制御システムおよび方法
機械(10)用の油圧制御システム(48)が開示される。この油圧制御システムは、第1流体アクチュエータ(26)と、加圧流体の第1の流れを生成するように構成される第1ポンプ(51)と、第2流体アクチュエータ(32)と、加圧流体の第2の流れを生成するように構成される第2ポンプ(53)とを有することができる。この油圧制御システムは、さらに、コンバイナ弁(108)と、制御器(112)とを有することができる。制御器は、第1流体アクチュエータに対する所望速度を示す操作者入力を受け取り、その所望速度に対応する第1流体アクチュエータ用の流量を決定し、かつ、第1ポンプの流量容量を決定するように構成することができる。制御器は、また、第1流体アクチュエータ用として決定された流量が第1ポンプの決定された流量容量よりも大きい場合には、コンバイナ弁を動かして、加圧流体の第2の流れを加圧流体の第1の流れと結合するように構成することができる。 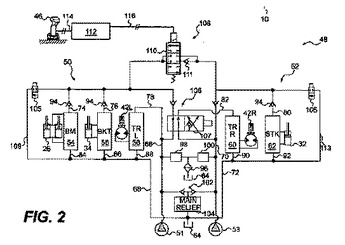 (もっと読む)
(もっと読む)
性能ベースの積載量管理のためのシステムと方法
運搬道路条件に基づき機械積載量を管理する方法は、作業環境において動作する機械に関連する性能データを収集する工程(310)と、収集された性能データに基づき機械の実際の有効積算勾配を決定する工程(320)と、を含む。有効積算勾配は目標有効積算勾配値(330)と比較され、実際の有効積算勾配が目標有効積算勾配値の閾値範囲内にない場合、複数の積載量レベルと関連する有効積算勾配をシミュレートすることができる(340)。模擬有効積算勾配が目標有効積算勾配値の閾値範囲内に入るようにさせる複数の積載量レベルの少なくとも1つを特定する(350)。 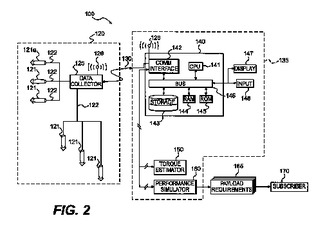 (もっと読む)
(もっと読む)
運搬道路条件を改善するためのシステムと方法
運搬道路面条件を改善する方法は、運搬経路上で動作する少なくとも1つの機械に関連する性能データを収集する工程(310)と、少なくとも1つの機械のそれぞれの転がり抵抗を性能データに基づき決定する工程(320)と、を含む。運搬経路の1つまたは複数の部分に関連する平均転がり抵抗は、少なくとも1つの機械のそれぞれの転がり抵抗に基づき決定される(330)。運搬経路の1つまたは複数の部分は、1つまたは複数の部分の平均転がり抵抗が閾値抵抗値を越えた場合、異常であると特定される(340)。運搬経路の異常部分に対する改修提案が生成され(350)、少なくとも1つの機械の性能は改修提案に基づきシミュレートされる(360)。本方法はまた模擬性能の結果を出力する工程(370)を含む。 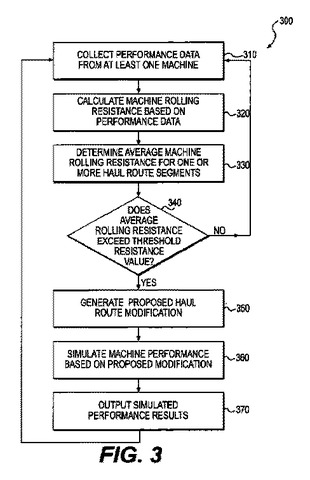 (もっと読む)
(もっと読む)
動力源回転数可変型CVT制御システム
パワートレーン制御システム(21)が開示されている。パワートレーン制御システムは、動力源(24)、および動力源の出力部(30)に結合されたCVT(26)を有し得る。パワートレーン制御システムはさらに、動力源およびCVTと通信する制御装置(48)を有し得る。制御装置は、複数の速度モードを備えるマップ(58)有し、かつ、複数の速度モードの少なくとも1つに対して、制御装置は、CVT出力回転数または対地速度の少なくとも一方に基づいて実際の動力源の回転数を変更するように構成され得る。 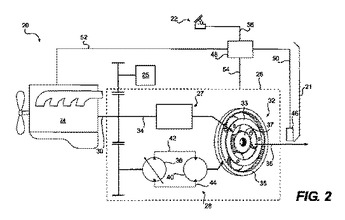 (もっと読む)
(もっと読む)
作業機械の多重形態のための共通パイプレイヤフレーム
エンジンハウジングと、第1履帯フレーム(34)と、第2履帯フレーム(34)とを有する無限軌道型の作業機械(10)用のパイプレイヤフレーム(100)が開示される。このフレームは、エンジンハウジングに取り外し可能に取り付けできる中心フレーム(104)と、第1履帯フレームおよび中心フレームに取り外し可能に取り付けできる第1側部フレーム(106)と、第2履帯フレームおよび中心フレームに取り外し可能に取り付けできる第2側部フレーム(102)とを有する。このフレームは、また、第1側部フレームに取り外し可能に取り付けできるスペーサ組立体(150)を有する。このフレームは、さらに、第2側部フレームおよび中心フレームの間に配置される調節可能な組立体(160)で、第2側部フレームおよび中心フレームの間の距離を調節するように構成される調節可能な組立体(160)を有する。 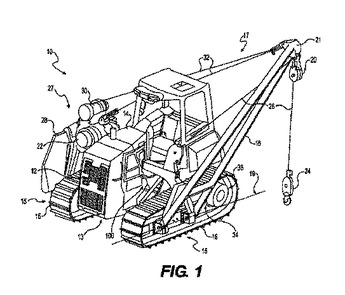 (もっと読む)
(もっと読む)
ペイロード制御用の機械間通信システム
ペイロード制御を高める方法が開示されている。この方法は、複数の作業サイクル中に、少なくとも1つの荷役作業機(10)によって物質を除去すること、および荷役作業機を少なくとも1つの運搬機(40)に対して関連させることを含む。この方法はまた、荷役作業機と運搬機との相対的な位置を決定すること、および、複数の作業サイクル中に、除去された物質を荷役作業機によって運搬機に積み込むことを含む。この方法はまた、複数の作業サイクルの少なくとも最後の作業サイクルの前に、運搬機内のペイロードおよびペイロード分散を判断すること、および、所望のペイロードおよびペイロード分散のために、複数の作業サイクルの少なくとも最後の作業サイクルに望まれる運搬機における追加のペイロードの量および位置を、機械間通信システム(34)を介して荷役作業機に通信することを含む。 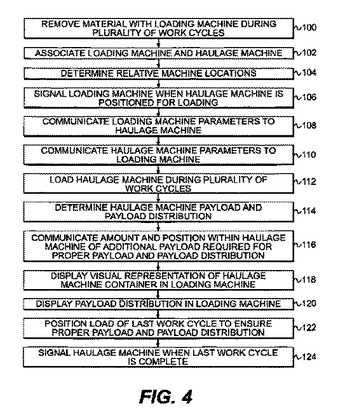 (もっと読む)
(もっと読む)
無段変速機用のトルクベース制御システム
被動要素を有する無段変速機(30)が提供される。無段変速機はまた、変速機動作モード要求を伝送するように構成された少なくとも1つのオペレータ入力装置(26)と、被動要素出力要求を伝送するように構成された少なくも1つの他のオペレータ入力装置(22、24)と有する。さらに、無段変速機は、変速機の動作状態を示す少なくとも1つのパラメータを検出するように構成された少なくとも1つのセンサ(46)を有する。無段変速機はさらに、動作モード要求、被動要素出力要求、および変速機の動作状態を示す少なくとも1つの検出したパラメータに応じて被動要素の出力を調整するように構成された制御装置(32)を有する。  (もっと読む)
(もっと読む)
建設機械の有界制限器具用の液圧流体管理
作業機械(10)のアクチュエータ(32A、32B、32C、34)間に液圧流体を割り当てる方法が、第1の要求流体流量を第1アクチュエータに供給するための第1の指令と、第2の要求流体流量を第2アクチュエータに供給するための第2の指令とを受け取る。この場合、第1アクチュエータは、操舵アクチュエータ(34)のような有界制限されるアクチュエータである。本システムは、第1および第2の指令(104)を次のように調整して、調整された第1および第2の流体流量に対応する調整された第1および第2の指令(108)を生成する。すなわち、本システムは、調整された第1および第2の流体流量の合計が、最大利用可能流量(303)よりも少ないかまたはそれに等しくなるように、かつ、調整された第1の流体流量が、第1の要求流体流量と、エンジン速度または他の変数の関数であるしきい値曲線(304)との小さい方に合致するかまたはそれを超えるように、第1および第2の指令を調整する。 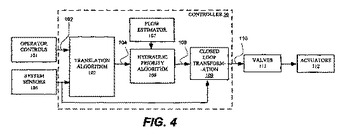 (もっと読む)
(もっと読む)
トンネルボーリングマシン用の回転カッター
トンネルボーリングマシンまたは同様の機械用の回転カッター(100)は、ハブ(120)に取り付けられたカッターリング(130)を有する。ハブ(120)はシャフト(110)に取り付けられる。ハブ(120)をシャフト(110)に支持しかつ相対回転を許容するために、スリーブ軸受システム(200)がハブ(120)とシャフト(110)との間に配置される。汚染物質がスリーブ軸受システム(200)に侵入しないようにするために、デュオコーンシールアセンブリ(300)がハブ(120)とシャフト(110)との間に配置される。スリーブ軸受システム(200)を潤滑するための潤滑油を有するオイルギャラリ(112)がシャフト(110)に設けられる。 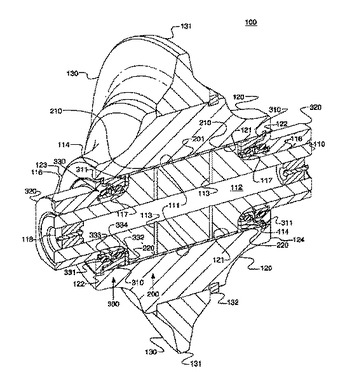 (もっと読む)
(もっと読む)
適応流量制御を実施するアクチュエータ制御システム
アクチュエータ制御システム(26)が開示される。アクチュエータ制御システムは、ポンプ(30)と少なくとも1つのアクチュエータ(36A)とを含むことが可能である。さらに、アクチュエータ制御システムは、少なくとも1つのアクチュエータを制御するように構成されたアクチュエータ弁(46)を含むことが可能である。アクチュエータ制御システムはまた、ポンプ圧力値を決定するように構成されたポンプ圧力センサ(64)と、負荷圧力値を決定するように構成された負荷圧力センサ(66)とを含むことが可能である。追加して、アクチュエータ制御システムは、ポンプ圧力値及び負荷圧力値を受信するように構成された制御器(56)を含んでもよい。さらに、制御器は、ポンプ圧力値と負荷圧力値とを比較し、この比較に基づき一次制御方式及び二次制御方式を選択的に実施するように構成可能である。 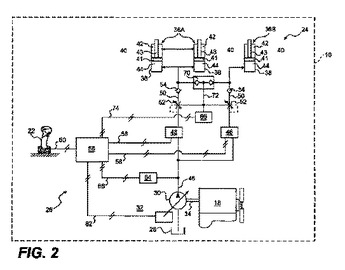 (もっと読む)
(もっと読む)
81 - 90 / 296
[ Back to top ]