
株式会社ソアテックにより出願された特許
1 - 10 / 30
光学式測定装置
【課題】測定対象に設けられた穴の傾斜角等を高精度で測定すること。
【解決手段】光源部106は、断面が線状で所定間隔に配置された複数の平行な光ビームから成る測定用光150を出力する。光検出部111、114は、測定対象130の穴132周辺領域で反射した測定用光150を検出する。制御部126は、光検出部111、114が検出した複数の光ビームと穴132周縁部との交点の位置座標を用いて各光ビームの垂直2等分線を求め、穴132と交差しない複数の光ビームと前記垂直2等分線との交点の位置座標と前記光ビームの既知の間隔とを用いて穴132の傾斜角を算出する。
(もっと読む)
傾斜角測定方法及び光学式測定装置

【課題】測定対象に設けられた穴の傾斜角を高精度で測定すること。
【解決手段】測定対象130の穴132を含む領域の原画像データを取得し、断面が面状の第1測定用光を測定対象130の穴132を含む領域に照射した状態で前記領域の第1画像データを取得し、断面が複数の線状光である第2測定用光を穴132を含む領域に照射した状態で前記領域の第2画像データを取得し、第1画像データと原画像データの差をとることによって、穴132を含む領域における第1測定用光に関する第3画像データを取得し、第2画像データと原画像データの差をとることによって、穴132を含む領域における第2測定用光に関する第4画像データを取得し、第3画像データにおける穴132周縁部と第4画像データにおける第2測定用光との複数の交点の位置データを算出し、前記位置データを用いて穴132の傾斜角を算出する。
(もっと読む)
光学式測定システム
【課題】 高速で高精度な測定を行えるようにすること。
【解決手段】 測定対象120に測定用光を照射する光源部101と、光源部101とは位置関係が無関係であるが相互の位置関係が既知で、測定対象120からの測定用光を偏向する第1、第2光偏向素子108、109と、第1、第2光偏向素子108、109からの測定用光を検出する1つの光検出素子105と、測定対象120から反射した測定用光が第1、第2光偏向素子108、109の双方を介して光検出素子105へ入射する測定対象120上の点Pについて、第1、第2光偏向素子108、109を介して光検出素子105が検出した測定用光に基づいて三角測距法によって測定対象120についての長さに関する情報を算出する演算装置115とを備えている。
(もっと読む)
光学式測定装置及び位置合わせシステム
【課題】 複数の部材の相対的位置を、簡単な構成で光学的に測定できるようにすること。
【解決手段】 光源103及びコーンミラー104を有する光出力部101からは複数の方向に面状の測定用光130、131が出力される。第1光偏向部107は光出力部101からの測定用光130を第1の方向に偏向し第1測定用光として対象物112及び対象物112の穴113に挿入された対象物114に向けて出力する。第2光偏向部109は光出力部101からの測定用光131を第2の方向に偏向し第2測定用光として対象物112、114に向けて出力する。光検出部115は対象物112、114によって反射した第1、第2測定用光130、131を検出し、演算制御部116は光検出部115によって検出した測定用光に基づいて三角測量法によって対象物112、114間の間隙を算出する。
(もっと読む)
位置合わせ装置及び保持装置
【課題】 複雑な位置合わせであっても精度良く行えるようにすること。
【解決手段】 支持部材110に取り付けられた光発生部101は、光源102が発生した光を、コーンミラー103の頂部104を含む反射部105によって直角方向に反射し、放射状の測定用光130を出力する。光センサ107は、円柱状穴116を有する対象物115の円柱状穴内壁面109で反射した測定用光130を検出して対応する検出信号を出力する。制御部121及び制御装置114は、前記検出信号に基づいて円柱状穴116の中心軸と支持部材110の中心軸との距離が許容値内になるように支持部材110と対象物115の少なくとも一方の位置を制御し、両者の位置合わせが終わった後、チャック120を制御して爪部材111〜113を円柱状穴内壁面109に当接させ、チャック120によって対象物115を保持する。
(もっと読む)
光源装置
【課題】 ビームウエスト位置を検出することが可能な光源装置を提供すること。
【解決手段】 光源104からの光ビーム108は、レンズ系105を介してコーンミラー106の反射部125によって反射され、放射状に放射状光121として出力される。ビームウエスト位置算出部120は、各検出部116〜119が検出した放射状光121の断面の幅に基づいてビームウエスト122の位置を算出する。制御部102は、レンズ系位置算出部115からのレンズ系105の現在位置情報、ビームウエスト位置算出部120からのビームウエスト位置情報及び距離測定部127からの照射位置情報に基づいて、ビームウエスト122が照射点に位置するように、モータ109を制御する。スライダ112はモータ109の駆動によってレンズ系105のフォーカス位置を変更し、その結果、ビームウエスト122の位置が変更される。
(もっと読む)
光源装置及び光学式測定装置
【課題】光エネルギを有効利用すること。
【解決手段】光源101からコーンミラー102に向けて光ビームが照射されると、前記光はコーンミラー102の少なくとも頂部103を含む円錐面104の反射部によって90度方向に放射状に反射される。前記放射状光中の第1領域の光107は、対象物110に向けて直接出力される。対象物110には前記第1領域光によって光切断ラインが形成される。前記放射状光中の第2領域の光108は、第1反射ミラー105によって90度方向に反射された後、第2反射ミラー106によって90度方向に反射され、対象物110の他の部分に向けて出力される。対象物110の前記他の部分には第2領域光108によって光切断ラインが形成される。
(もっと読む)
非接触式3次元形状測定装置
【課題】 測定対象物の形状や大きさによって基準物が配置された回転テーブルの大きさや形状を変更せず、また回転テーブルの上で測定対象物の向き等の位置を変えることなく、測定対象物の外形全体の測定を可能にする装置を提供する。
【解決手段】 非接触式3次元形状測定手段によって、各領域の測定と同時に測定する、直方体で前記直方体の上面、前後の相対する面、及び左右の相対する面に1個、もしくは複数の球体を有する測定基準物を備えている。また、非接触式3次元形状測定手段により各領域の測定と同時に測定する、基板の上に直方体を固定し、前記直方体の前後、左右の面から間隙を設けた位置に球体が取り付けられた測定基準物を備えている。
(もっと読む)
光学装置、光源装置及び光学式測定装置
【課題】簡単な構成で多様な測定が可能な光学式測定装置を提供すること。
【解決手段】光源126からの測定用光124は、レンズ系107を介してコーンミラー108の反射部121によって反射され、光遮蔽部材105、106の開口を介して、幅広で放射状の欠陥測定用光119として測定対象150側に出力される。コーンミラー108の貫通穴109を通過した測定用光125は、コーンミラー110の頂部111周辺の反射部122によって反射され、光遮蔽部材105、106の開口を介して、幅狭で放射状の長さ特性測定用光120として測定対象150側に出力される。測定対象150で反射した欠陥測定用光119と長さ特性測定用光120は、各々、測定部112、116によって検出され、演算制御部128によって測定対象150の欠陥の有無判別や形状算出等が行われる。
(もっと読む)
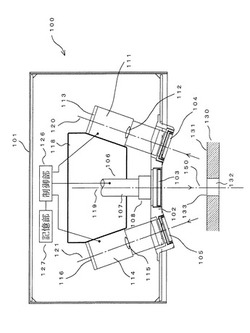
光学式測定システム及び光源装置
【課題】簡単な構成で、所定位置に固定した原点を基準として、移動する測定対象の形状等を高精度に測定すること。
【解決手段】相互の位置関係が既知の光学式測定部121、123を有する複眼測定部125を所定の固定位置である原点に配設し、反射部132に標点118〜120を形成する標点用光と測定対象130に測定用の測定用光を出力する光生成部133〜135及び標点118〜120に対して所定位置に設けられた測定部136を有する光学式測定器131をアーム式多関節ロボット100のハンド部114に一体的に設け、演算制御部138によって標点用光及び測定用光を出力するように制御する。この状態で、複眼測定部125によって原点を基準として標点118〜120の座標を測定すると共に、測定部136によって測定対象130の形状等を測定し、これらの測定値に基づいて、原点を基準として測定対象130の形状等を測定する。
(もっと読む)
1 - 10 / 30
[ Back to top ]