
株式会社国際電気通信基礎技術研究所により出願された特許
111 - 120 / 905
音声認識装置、音声認識方法、及び音声認識ロボット
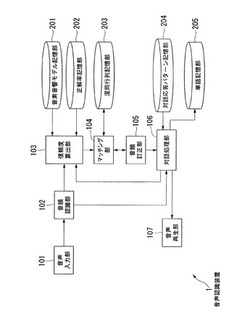
【課題】未登録語を登録する際、ユーザが音声のみを用いて認識した音韻を訂正することができる音声認識装置、音声認識方法、及び音声認識ロボットを提供する。
【解決手段】音声入力部は音声を入力し、音韻認識部は入力された音声の音韻を認識して訂正発話を示す第1の音韻列を生成し、マッチング部は第1の音韻列と元発話を示す第2の音韻列とをマッチングを行い、音韻訂正部はマッチングを行った結果に基づき第2の音韻列の音韻を訂正する。
(もっと読む)
地図情報システム、端末装置、サーバ装置およびプログラム

【課題】従来、手書きの地図等の上に地理的な情報を付加して閲覧することができなかった。
【解決手段】1以上の端末装置とサーバ装置とを具備する地図情報システムであって、端末装置は、出力している地図の地図識別子と現在位置情報とを有する端末情報を、サーバ装置に送信する端末情報送信部と、地図上の地点に関する情報である地点情報をサーバ装置から受信する地点情報受信部と、地点情報に対応する情報である出力情報を出力する情報出力部を具備し、サーバ装置は、絶対位置情報と相対位置情報との組である位置対応情報を地図識別子ごとに格納している地図情報格納部と、端末情報を受信する端末情報受信部と、端末情報を用いて、地点情報を取得する地点情報取得部と、地点情報を端末装置に送信する地点情報送信部を具備する地図情報システムにより、手書きの地図等の上に地理的な情報を付加して閲覧できる。
(もっと読む)
無線通信システム、受信局、および送信局
【課題】ダイナミックスペクトラムアクセスシステムにおいて、データ伝送のスループットが低下する。
【解決手段】受信局と送信局とが無線により通信を行う無線通信システムにおいて、受信局がチャネルセンシング結果を送信し、送信局がデータ伝送周波数を決定すると共にデータチャネル情報とデータチャネルを同時に送信する通信手順を採用するにより、ダイナミックスペクトラムアクセスシステムにおいて、チャネルセンシング結果の交換による時間遅延のために、データ伝送のスループットが低下することを防止する。
(もっと読む)
回転センサ
【課題】角速度を検出することが可能な回転センサを提供する。
【解決手段】回転センサ300は、センサ素子201〜208を含む。センサ素子201〜208は、カンチレバーCL1〜CL8をそれぞれ含む。センサ素子201〜204は、基板101の表面の中央部近傍に配置される。センサ素子201〜204の外側にセンサ素子205〜208がそれぞれ配置される。センサ素子205のカンチレバーCL5はセンサ素子201のカンチレバーCL1と同じ方向を向き、センサ素子206のカンチレバーCL6はセンサ素子202のカンチレバーCL2と同じ方向を向き、センサ素子207のカンチレバーCL7はセンサ素子203のカンチレバーCL3と同じ方向を向き、センサ素子208のカンチレバーCL8はセンサ素子204のカンチレバーCL4と同じ方向を向く。
(もっと読む)
触覚提示付ロボット
【課題】 ユーザの状況に応じた多様な情報を擬人的かつ触覚的に提供する。
【解決手段】 触覚提示付ロボット10は、ロボット本体10Aおよびこれをユーザに装着するためのベルト10Bを備える。ロボット本体10Aにはユーザに対して視覚的および聴覚的に作用する視聴覚アクチュエータ(36−56)が、ベルト10Bにはユーザに対して触覚的に作用する触覚アクチュエータ(74−78)が設けられ、そしてユーザの位置,動き,環境,バイタルサインなどを検知するセンサ(62−70,80)がロボット本体10Aおよびベルト10Bに設けられる。コンピュータ(30)は、ユーザの状況をセンサで検知し(S3−S21)、状況に応じた情報をユーザに対して視聴覚アクチュエータおよび触覚アクチュエータで擬人的かつ触覚的に提示する(S25−S33,S37−S41)。
(もっと読む)
交通ハザードマップ生成装置
【解決手段】交通ハザードマップ生成装置は、第1群運転者および第2群運転者の個々の頭部動きデータおよび位置データを運転データして記憶し、頭部動きデータを積分して時系列データを得る(S117)。時系列の頭部動きデータに基づいて、それぞれの運転者が首振り確認動作を実行した場所のデータを確認場所データとして記憶する(S119)。ステップS123で第1群運転者が共通して首振り確認動作をした場所の第1群運転者確認場所データを抽出し、ステップS125で第2群運転者が共通して首振り確認動作をした場所の第2群運転者確認場所データを抽出する。そして、第1群運転者確認場所データおよび第2群運転者確認場所データを比較して顕在的危険箇所および潜在的危険箇所を特定する。
【効果】顕在的危険箇所だけでなく潜在的危険箇所も特定されるので、危険認知が不十分な一般運転者にも有効な交通ハザードマップを生成することができる。
(もっと読む)
地図情報処理装置、地図情報処理方法およびプログラム
【課題】従来、ユーザが入力した地図等を利用して、経路探索ができなかった。
【解決手段】画像上の相対位置情報と地図上位置情報とを対応付けた情報である1以上の位置情報を格納し得る位置情報格納部と、画像を出力する画像出力部と、始点情報および目的地点情報を受け付ける受付部と、始点情報に対応する始点地図上位置情報と目的地点情報に対応する目的地点地図上位置情報とを取得する始点等地図上位置情報取得部と、始点地図上位置情報が示す地点を始点とし目的地点地図上位置情報が示す地点を目的地点として、経路探索する経路探索部と、経路に含まれる複数の地図上位置情報に対応する相対位置情報を取得する経路上相対位置情報取得部と、複数の相対位置情報を用いて経路を画像上に出力する経路出力部とを具備する地図情報処理装置により、ユーザが入力した地図等を利用して経路探索できる。
(もっと読む)
無線装置およびそれを備えた無線ネットワーク
【課題】通信帯域を効率的に利用可能な無線装置を提供する。
【解決手段】送信元(Tx)の無線装置は、データパケットDATAを送信した後、肯定応答パケットACKの復号を完了すると、他の無線装置が送信処理を放棄したと判断するための送信放棄判断期間[AC]を新たに開始し、各無線装置の送信順番を示す送信予約テーブルを更新する。そして、送信元(Tx)の無線装置は、新たに開始した送信放棄判断期間[AC]の間にパケットを受信しないとき、その更新した送信予約テーブルの先頭に登録された無線装置がデータパケットの送信処理を放棄したと判断し、その先頭に登録された無線装置を送信予約テーブルから削除して送信予約テーブルを更新する。その後、送信元(Tx)の無線装置は、最終的に更新された送信予約テーブルに従ってデータパケットを送信可能であると判定したとき、データパケットを送信する。
(もっと読む)
傾聴対話持続システム
【課題】コミュニケーション障害のある者同士の対話が持続可能なテレビ電話を提供する。
【解決手段】傾聴対話持続システム100は、モニタ16a、マイク20aおよびモニタカメラ22aが接続されるPC14aと腹部カメラ12aが設けられるロボット10aとを含む。PC14aでは、モニタカメラ22aおよび腹部カメラ12aによって撮影されたユーザAの画像とマイク20aによって集音されたユーザAの音声とに基づいてユーザAの行動が判定され、メモリに記憶される。また、PC14aでは、第1所定時間分の行動データからユーザAの状態を認識する。そして、ユーザの状態が「アクティブ・トーク・モニタ」と認識されていれば、PC14aはロボット10aがユーザAに対して疑似傾聴を行うように、ロボット10aに動作命令を付与する。
(もっと読む)
通信システム
【課題】マルチパス環境においても、受信信号強度に基づいて無線装置間の距離を正確に判定可能な通信システムを提供する。
【解決手段】基地局1〜16は、マルチパス環境において予め実測された受信信号強度の各距離における分布を示す距離識別関数を参照して、距離の識別時に検出した受信信号強度に対応する基地局1〜16と無線装置21〜30との間の距離の確からしさ(=確率)を求め、最大の確からしさ(=確率)が得られる距離識別関数に対応する距離を基地局1〜16と無線装置21〜30との間の識別距離として検出する。
(もっと読む)
111 - 120 / 905
[ Back to top ]