
株式会社国際電気通信基礎技術研究所により出願された特許
151 - 160 / 905
機械および機械システム
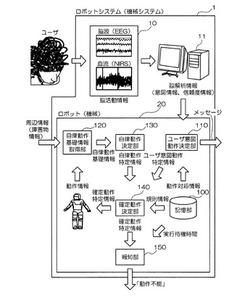
【課題】BMIを適用した機械操作(例えば、ロボット操作)において、ユーザの煩わしさ、負担を軽減する技術を提供することを目的とする。
【解決手段】機械(例えば、実施の形態におけるロボット20)は、ユーザの脳活動を解析した脳解析情報に基づいてユーザの意図に基づく動作であるユーザ意図動作を決定するユーザ意図動作決定部110(ユーザ意図動作決定手段)と、自律動作を決定する際の基礎となる自律動作基礎情報を取得する自律動作基礎情報取得部120(自律動作基礎情報取得手段)と、前記自律動作基礎情報に基づいて前記自律動作を決定する自律動作決定部130(自律動作決定手段)と、前記ユーザ意図動作および前記自律動作に基づいて実行するべき確定動作を決定する確定動作決定140(確定動作決定手段)とを備える。
(もっと読む)
所有者識別システム

【課題】無線端末の所有者を識別することができる所有者識別システムを提供する。
【解決手段】所有者識別システム100は、複数の人間が居るショッピングモールなどに設置された6台のLRF16a,16bと、AP14を有する中央制御装置10とを含む。中央制御装置10は、或る人間が所有する携帯端末12と、AP14との電波強度rを測定すると共に、LRF16a,16bによって検出される複数の人間の位置(x,y)からAP14までの距離dを算出する。また、中央制御装置10は、事前学習によって作成した分析テーブルから、電波強度rに対応する平均距離Dと標準偏差σを特定する。そして、中央制御装置10は、人間毎に、携帯端末12を所有する確率を求め、最大値かつ所定値以上である人間を携帯端末12の所有者として推定する。
(もっと読む)
リングレーザジャイロ
【課題】測定精度を高めることが可能な新規なリングレーザジャイロを提供する。
【解決手段】本発明のジャイロは、周回光路10、ファラデー回転子13、周回光路10を互いに逆方向に進行する第1および第2のレーザ光を発生させるための光増幅手段、光取り出し手段(光結合器15)、受光素子(フォトダイオード20)、および、周回光路10を第1の状態と第2の状態との間で切り替えるための手段(光路切り替えスイッチ18)を備える。周回光路10は、環状の第1の光路11と環状の第2の光路12とを含む。第1の状態では、第1のレーザ光が第1および第2の光路11および12を時計回りに進行する。第2の状態では、第1のレーザ光が第1の光路11を時計回りに進行し、且つ、第2の光路12を反時計回りに進行する。第2の状態におけるフォトダイオード20の出力を用いて、第1の状態における回転角速度の検出が構成される。
(もっと読む)
ネットワークロボットシステム、ロボット制御装置、ロボット制御方法およびロボット制御プログラム
【構成】 ネットワークロボットシステム10は、ロボット12を含み、ロボット12はサービスの提供に係る移動経路の生成要求の要求メッセージをロボット制御装置102に送信する。ロボット制御装置102は、要求メッセージを受けて、ロボット12同士が衝突しないように、当該要求メッセージについての移動経路を生成する。そして、ロボット制御装置102は、移動経路のうちの一定時間(T秒)分の移動経路についての移動経路データをロボット12に送信する。
【効果】 他のロボットと干渉することなく、確実に移動することができる。
(もっと読む)
監視装置
【構成】監視装置10は、ショッピングモールに設置されるLRF(12)を備える。ショッピングモール内の人間は、LRF(12)を利用して局所行動が検出され、位置情報DB(20)に蓄積される。監視装置10は、1時間毎に局所行動を読み出して、クラスタリング地図を作成し地図DB(22)に蓄積する。さらに、管理装置10は、10分毎に局所行動を読み出してクラスタリング地図を作成し、異なる日付で、同じ時刻に検出された局所行動を含むクラスタリング地図を読み出す。2つのクラスタリング地図は空間グリッド毎に差分が算出され、監視装置10は算出された差分が閾値以上であれば異常を通知する。
【効果】管理者は、異なる時間の局所行動を表わす2つのクラスタリング地図を比較することで異常を通知する監視装置10を利用して、ショッピングモールを大局的に監視できるようになる。
(もっと読む)
録音装置
【課題】この発明は、音声認識に適した音声信号を記録することができるとともに、音響条件等の変化に応じて録音レベルを調整することが可能な録音装置を提供することを目的とする。
【解決手段】録音装置は、可変ゲインアンプのゲインを設定するゲイン設定手段と、録音開始指令を入力するための入力手段と、録音開始指令が入力される毎に、所定の一定時間、録音動作を実行させる録音制御手段とを含んでいる。ゲイン設定手段は、過去の録音時において記録手段に記録された音声信号に基づいて、今回の録音時における可変ゲインアンプのゲインを設定し、今回の録音が終了するまでは、設定されたゲインを維持させる。
(もっと読む)
行動識別システム
【課題】DBからの外れ値削除を会話的に行い、センサ情報に基づくラベル付加およびDB登録を事後的かつ会話的に行う。
【解決手段】行動識別システム100はPC10を含み、PC10は会話的外れ値削除アプリケーション18および会話的ラベル付加アプリケーション22等の機能を実現する。会話的外れ値削除アプリケーション18は、行動識別エンジン14から出力される行動情報が示す特徴,ラベルおよび時間を、モニタ(52)に表示されたアノテーション付きセンサデータ画面を参照しつつ入力装置(54)で行われる外れ値削除操作に応じて、辞書DB16cおよびアノテーションDB16bから削除する。会話的ラベル付加アプリケーション22は、同様の特徴,ラベルおよび時間を同様に行われるラベル付加操作に応じて辞書DB16cおよびアノテーションDB16bに追加する。
(もっと読む)
送信機およびそれを備えた通信システム
【課題】隣接チャネルへの電力漏洩を抑制し、かつ、平均電力に対するピーク電力を低減可能な送信機を提供する。
【解決手段】送信機1において、バンドパスフィルタBPF1〜BPF4は、送信スペクトラムΣδ(t−nTs)anをそれぞれ伝達関数H1(ω)〜H4(ω)によって分割送信スペクトラムDVS1〜DVS4に分割し、その分割した分割送信スペクトラムDVS1〜DVS4に畳み込み演算を施して帯域を制限する。乗算器MP1〜MP4は、それぞれ、バンドパスフィルタBPF1〜BPF4から受けた分割送信スペクトラムDVS1〜DVS4にejω1t〜ejω4tを乗算して周波数を変換する。加算器SUM1は、周波数が変換された分割送信スペクトラムDVS1’〜DVS4’を直列に配列して送信する。
(もっと読む)
情報提供システム
【構成】情報提供システム100は、中央制御装置10、LRF12およびロボット14を含む。中央制御装置10が備えるメモリ(18)には、ショッピングモール内の店舗などに関するリコメンド情報であるトピックスと、店舗などに向かう大局行動を表わす移動軌跡(P_Tx)が記憶される。ショッピングモール内の人間は、LRF12によって移動軌跡(P)が検出され、最も類似する移動軌跡(P_Tx)が特定される。そして、中央制御装置10は、特定された移動軌跡(P_Tx)に対応するトピックスの発話内容を読み出し、人間の位置と共にロボット14に付与する。ロボット14は、付与されたトピックスの発話内容を発話することで、人間にリコメンド情報を提供する。
【効果】人間は、検出された移動軌跡から大局行動が予測され、予測された大局行動に基づいて、リコメンド情報が提供される。
(もっと読む)
遠隔操作装置
【構成】遠隔操作装置10は、LRF12a,12bを含み、LRF12a,12bと同じ場所に設けられるロボット14を遠隔操作する。遠隔操作装置10はLRF12a,12bを利用して検出領域(E)内に居る人間の局所行動を検出し、その局所行動を記録する。検出領域(E)内は空間グリッド化され、その空間グリッド毎に局所行動のヒストグラムが算出される。遠隔操作装置10は、ヒストグラムから算出される類似度に基づいて空間グリッドをクラスタリングして、クラスタリング地図をLCD(22)に表示する。表示されたクラスタリング地図に含まれる任意のエリアが選択されると、ロボット14には、選択されたエリアの属性に基づいて決まる動作命令と、座標情報とが付与される。
【効果】使用者は、複数の人間の行動が視覚的に示されるクラスタリング地図を参照して、ロボット14を遠隔操作することができる。
(もっと読む)
151 - 160 / 905
[ Back to top ]