
株式会社国際電気通信基礎技術研究所により出願された特許
201 - 210 / 905
光ファイバジャイロ
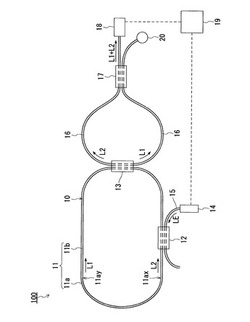
【課題】分解能が高い光ファイバジャイロを提供する。
【解決手段】本発明の光ファイバジャイロは、周回光路10を構成する光ファイバであって励起光の入力によって周回光路10を互いに逆方向に進行するレーザ光L1およびL2を発振させる光アンプ部11aを少なくとも一部に含む光ファイバ11と、励起光を出射する半導体レーザ素子14と、周回光路10に配置され励起光を光ファイバ11に伝播するWDMカプラ12と、周回光路10に配置されレーザ光L1およびL2の一部を周回光路10から取り出す光カプラ13と、周回光路10から取り出されたレーザ光L1およびL2の周波数差を検出するためのフォトダイオード18とを備える。レーザ光L1およびL2の波長λにおけるWDM12カプラの挿入損失P1(dB)、および、波長λにおける光カプラ13の挿入損失P2(dB)のいずれか一方が他方の0.5倍以上で2倍以下である。
(もっと読む)
無線装置およびそれを備えた無線ネットワーク

【課題】転送信号と受信信号との干渉を抑制してパケットを転送可能な無線装置を提供する。
【解決手段】無線装置(Add3)は、緊急パケットを生成し、その生成した緊急パケットを周波数チャネルf1および拡散符号Code2を用いて送信する。無線装置(Add2)は、無線装置(Add3)からの緊急パケットの受信が完了した後に緊急パケットを周波数チャネルf1および拡散符号Code2を用いて転送する。無線装置(Add1)および無線装置(Add6)は、それぞれ、無線装置(Add2)および無線装置(Add1)からの緊急パケットの受信が完了した後に緊急パケットを周波数チャネルf1および拡散符号Code2を用いて転送する。
(もっと読む)
無線装置およびそれを備えた無線ネットワーク
【課題】通信効率を向上可能な無線装置を提供する。
【解決手段】送信グループに含まれる無線装置がRTSパケットをマルチキャストし、無線装置6〜9は、RTSパケットを受信する。そして、無線装置6〜9のうち、無線装置3との間で最も良い通信品質を有する無線装置8がCTSパケットをマルチキャストし、無線装置2〜5は、CTSパケットを受信する。その後、無線装置2〜5のうち、無線装置8との間で最も良い通信品質を有する無線装置4がデータパケットを無線装置8へ送信する。そして、無線装置8は、データパケットを受信し、ACKパケットをRTSパケットの送信元である無線装置3へ送信する。それ以降、データパケットは、同じ方法によって、送信先である無線装置11へ中継される。
(もっと読む)
道案内ロボット
【構成】人間に目的地までの経路を案内する際に、目的地までの経路が複雑であり難易度が高いか否かを判断する(S25,S31)。そして、難易度が高くない場合は(フラグH:オフ)、人間が容易に経路を理解できるため、腕による方向の指示と音声とによって経路を説明して案内し、難易度が高い場合は(フラグH:オン)、人間の理解を助けるため、腕による方向の指示および音声に、体の向きによる方向の指示を加えて経路を説明して案内する。
【効果】人間による理解の容易化と、道案内ロボットの体の旋回による無駄な待ち時間の発生やエネルギーの消費の防止とを両立できる。
(もっと読む)
アンテナ装置およびそれを備えたアレーアンテナ装置
【課題】ミリ波帯で広帯域に動作するアンテナ装置を提供する。
【解決手段】アンテナ装置10は、スロット素子1〜4と、導波管5と、地板6とを備える。スロット素子1〜4は、導波管5の一主面に略平行に配置され、終端面5Cから給電面5Bへ向かうに従って長さliが長くなっている。スロット素子1は、終端面5Cから距離dの位置に配置される。スロット素子2〜4は、それぞれ、スロット素子1〜3との間隔がgになるように配置される。そして、スロット素子1〜4の各々は、同じ幅wiを有する。導波管5は、長さL、幅wgおよび高さtの平板形状からなる。地板6は、導波管5の上面5Aに導波管5に接して配置される。この場合、導波管5の終端面5Cと地板6の端との距離は、pに設定される。
(もっと読む)
無線装置
【課題】緊急パケットの到達率を向上可能な無線装置を提供する。
【解決手段】無線装置1の緊急パケット発生手段115は、外部から受けた緊急情報を含む緊急パケットを発生してMACモジュール112を介して送受信手段111へ出力するとともに、信号OEMGを発生して定期パケット発生手段114へ出力し、送受信手段111は、周波数チャネルftおよび拡散符号Code_tを用いて緊急パケットを送信する。また、送受信手段111の転送処理部1111は、緊急パケットを受けると、信号REMGを生成して定期パケット発生手段114へ出力するとともに、ヘッダを更新し、その更新したヘッダを一時記憶したヘッダ以外の部分に付加して緊急パケットを転送する。定期パケット発生手段114は、信号OEMG,REMGに応じて、定期パケット停止期間の間、定期パケットの送信および転送を禁止する。
(もっと読む)
無線装置およびそれを備えた無線ネットワーク
【課題】同じ拡散符号チャネルであっても、パケット単位で、受信電力及び伝搬路の状況が異なる環境下において、干渉波を除去可能な無線装置を提供する。
【解決手段】無線装置は、周波数f1〜f4に対応して受信回路131〜134を備える。受信回路131〜134の各々において、チャネル制御回路20は、対応する周波数fi(i=1〜4)で受信した受信信号を拡散符号Code1〜Code7によって逆拡散して得られた値の絶対値の平均値を演算し、その演算した平均値に基づいて、干渉を除去するか否かを決定するためのしきい値を演算する。そして、チャネル制御回路20は、しきい値以上のk個の平均値が得られたときのk個の拡散符号を検出する。そして、干渉除去回路30,40は、チャネル制御回路20からのk個の拡散符号を用いて干渉量の大きい順に受信信号から干渉を除去する処理を2段階で実行する。
(もっと読む)
触覚センサを有するロボット
【構成】ロボット10は、たとえば、触覚インタラクションのために触覚センサ(58,76)を備えるコミュニケーションロボットである。ロボット10は、複数の姿勢領域のそれぞれに対応付けられた、動作データと触覚センサ出力データの関係を示す線形モデルを記憶している。ロボット10が運動する際には、ロボット10は動作データすなわち関節角度データを取得し、現在の姿勢領域に対応する線形モデルを選択し、当該線形モデルを用いて触覚センサ出力データを推定する。そして、ロボット10は、実際に取得された触覚センサ出力データから推定値を差し引くことによって、自己動作に起因するノイズを除去する。
【効果】自己動作に起因する触覚ノイズを除去することができる。
(もっと読む)
位置推定方法および装置
【構成】センサの位置を示すセンサ頂点VS、空間領域の位置を示す領域頂点VR、および領域頂点VRとセンサ頂点VSとを結ぶエッジEからなるグラフ構造G上に粒子の分布が制限された1または2以上の粒子フィルタを用いて、空間領域内の対象の位置を推定する位置推定方法であって、
センサにおいて対象が検出されたとき、グラフ構造G上において当該センサを示すセンサ頂点VSと最も距離が近い粒子フィルタを伝播モードとし(S29)、それ以外の粒子フィルタを固定モードとし(S31)、センサにおいて対象が検出されないとき、すべての粒子フィルタを固定モードとする(S25)。
【効果】対象が一定の空間領域に長期間存在して検出されない場合や任意の粒子フィルタが観測を勝ち取らなかった場合でも粒子がグラフ構造G上の方々に分散することを防止できる。
(もっと読む)
光ジャイロセンサ及びその製造方法
【課題】光導波路と光増幅器を半導体基板上に高精度に集積化できる光ジャイロセンサ及びその製造方法を提供する。
【解決手段】半導体基板1と、半導体基板1上に配置され、出力面11及び出力面12をそれぞれ有する光増幅器10と、出力面11及び出力面12にそれぞれ密接する端面を有して光増幅器10と共にリング状の光路を構成するように半導体基板1上に配置され、出力面11から出力される第1レーザ光L1及び出力面12から出力される第2レーザ光L2が互いに異なる周回方向に伝搬する光導波路20と、半導体基板1上に配置され、第1レーザ光L1及び第2レーザ光L2のそれぞれ一部が光導波路20から移行する検出路30と、検出路30に移行した第1レーザ光L1及び第2レーザ光L2のそれぞれ一部が合波して生じるビート信号を検出する信号検出器40とを備える。
(もっと読む)
201 - 210 / 905
[ Back to top ]