
株式会社国際電気通信基礎技術研究所により出願された特許
21 - 30 / 905
コミュニケーションロボット
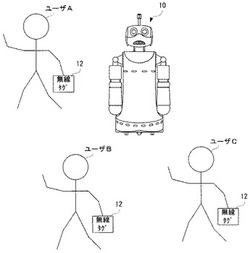
【構成】 コミュニケーションロボット10は、CPU(80)を含み、道案内などのサービスを提供する。CPU(80)は、案内するユーザの知識量、当該ユーザがロボット10の合成音声を聞いた経験の有無、案内時の移動の有無、および案内時のジェスチャの有無に応じて、合成音声の発話速度を決定する。
【効果】 ユーザの知識や能力および案内する状況に応じて適切な発話速度を決定することにより、ユーザにとって心地よい発話速度でサービスを提供することができる。
(もっと読む)
インピーダンス自動整合回路

【課題】アンテナと受信回路との間のインピーダンスを自動的に整合させるインピーダンス自動整合回路を提供する。
【解決手段】アンテナ11と受信回路21との間に配設されるインピーダンス自動整合回路1であって、アンテナ11と受信回路21との間に存在し、制御情報に応じて両者のインピーダンスを整合させる整合回路12と、受信回路21における受信品質を受け付け、最適化アルゴリズムにより、受信品質が大きくなるように制御情報を更新して整合回路12に与えることにより、アンテナ11と受信回路21との間のインピーダンスを整合させる制御部13とを備える。
(もっと読む)
計測装置,計測方法および計測プログラム
【課題】 レーザレンジファインダで複数の対象を計測して多様な情報を得る。
【解決手段】 計測装置(10)は、スキャン面(Scn)が水平面に対して傾斜したLRF(14)で複数の対象(T1,T2,…)を計測する。計測装置のコンピュータ(12)は、ステップS1で複数の対象に関する3次元形状モデル(M1,M2)をデータベース(50)に登録し、その後、ステップS3でLRF14を制御してスキャン面の水平面に対する傾斜角(α)を変化させつつ、ステップS5〜S19(およびS21〜S39)で複数の対象それぞれのパーティクルフィルタ(38a,38b,…)を用いてLRF14からの計測データと3次元形状モデルとの比較を行うことにより複数の対象それぞれの3次元形状および姿勢、特に人の体の方向および頭の方向を少なくとも推定する。
(もっと読む)
視線方向の推定装置、視線方向の推定方法およびコンピュータに当該視線方向の推定方法を実行させるためのプログラム
【課題】顔の向きの制限を緩和して、比較的少数のカメラにより、観測範囲内の任意の位置における被測定対象者の視線方向のリアルタイムに推定し追跡する視線方向の推定装置を提供する。
【解決手段】第2の頭部位置・姿勢推定部5612は、撮影できている複数のカメラからの画像データを統合して処理することにより、頭部の位置および頭部の姿勢の推定処理を実行する。処理対象となっている画像フレーム以前に獲得されている眼球の3次元モデルに基づいて、眼球中心推定部5614は、処理対象の特定人物の眼球中心の3次元的な位置を推定する。虹彩中心抽出部5616は、虹彩の中心の投影位置を検出する。視線方向推定部5618は、抽出された虹彩の中心の投影位置である画像フレーム中の2次元的な位置と、推定された眼球の3次元的な中心位置とに基づいて、視線方向を推定する。
(もっと読む)
視線計測システム、方法およびプログラム
【構成】 サーバ12は、ステップS105で、顔の特徴点の位置データを取得し、ステップS107で顔の姿勢および位置のデータを取得する。ステップS111において、特徴点の位置データおよび顔の位置および姿勢データに基づいてフレーム画像毎に個人パラメータおよびフレームパラメータを設定し、ステップS115で、個人パラメータおよびフレームパラメータの各フレーム顔画像に対する適合度を示すスコア値を計算し、全フレーム画像についてそのスコア値を積算する。積算スコア値が所定の閾値を下回るまで、ステップS121で各パラメータを修正する。修正された個人パラメータおよびフレームパラメータに基づいて、眼球中心と虹彩中心を結ぶ3次元直線として視線方向を計測する(S123)。
【効果】 全フレームの顔画像と照合して個人的パラメータおよびフレームパラメータを修正するので、視線の推定または計測の精度を向上させることができる。
(もっと読む)
音源定位装置
【課題】音源定位とそれら音源の属性の判定とを行なうことができる音源定位装置を提供する。
【解決手段】音源定位装置は、人の位置を検出するLRF(レーザレンジファインダ)群56と、マイクロホンアレイ群52の出力から得られる複数チャンネルの音源信号の各々と、マイクロホンアレイに含まれる各マイクロホンの間の位置関係と、LRF群56の出力とに基づいて、複数の方向の各々について、所定時間ごとにMUSICパワーを算出し、そのピークを音源位置として所定時間ごとに検出する音源定位処理部60と、マイクロホンアレイの出力信号から、音源定位処理部60により検出された音源位置からの音声信号を分離する音源分離処理部70と、分離された音声信号の属性を人位置計測装置58の出力を用いて高精度で判定する音源種類同定処理部72とを含む。
(もっと読む)
通信システム
【課題】送信電力を制御できる無線装置と、送信電力を制御できない無線装置とが共存する環境において送信電力を制御可能な通信システムを提供する。
【解決手段】通信システムは、アクセスポイント11〜20を備える。アクセスポイント11,12,15〜20は、送信電力を制御するアクセスポイントであり、アクセスポイント13,14は、送信電力を制御しないアクセスポイントである。アクセスポイント11,12,15〜20は、1つのスロットのdoTPC時間帯において、最大の送信電力Pmaxよりも小さい送信電力を用いてデータパケットを送受信する。アクセスポイント13,14は、1つのスロットのnoTPC時間帯において、最大の送信電力Pmaxでデータパケットを送受信する。
(もっと読む)
強化学習装置、制御装置、および強化学習方法
【課題】従来、報酬関数を構成する多数の項の間で発生するトレードオフが、ロボットの運動学習の妨げとなっていた。
【解決手段】制御対象の環境に関する1以上の第一種環境パラメータの値を取得する第一種環境パラメータ取得手段と、1以上の第一種環境パラメータの値を報酬関数に代入し、報酬関数が出力する報酬を最大とするような1以上の制御パラメータの値を算出する制御パラメータ値算出手段と、1以上の制御パラメータの値を制御対象に対して出力する制御パラメータ値出力手段と、仮想外力に関連する1以上の第二種環境パラメータの値を取得する第二種環境パラメータ取得手段と、1以上の第二種環境パラメータを仮想外力関数に代入し、仮想外力を算出する仮想外力算出手段と、仮想外力を制御対象に対して出力する仮想外力出力手段とを具備する強化学習装置により、すばやくかつ安定して、ロボットの運動学習が行える。
(もっと読む)
価格決定装置、価格決定システム、価格決定プログラムおよび価格決定方法
【解決手段】価格決定装置12はCPUを含み、CPUは、複数のLRF14の出力に基づいて、買い物する客の移動軌跡を検出する。CPUは、客の移動軌跡に基づいて、当該客の行動が予め登録された大局的な行動であると推定すると、当該大局的な行動に対応して予め登録された商品についての価格を特別価格に変更する。
【効果】客毎に価格を可変的に設定するので、バリエーションの豊富なサービスを提供することができる。
(もっと読む)
無線通信システム、通信装置、情報機器、及び無線通信方法
【課題】情報機器の筐体内において、無線通信を行う無線通信システムを提供する。
【解決手段】第1の通信装置3は、アンテナを介して通信信号を送信する第1の送信部と、通信信号を第1の送信部によって送信させる第1の制御部6とを備える。第2の通信装置4は、通信信号をアンテナを介して受信する第2の受信部と、第2の受信部が受信する通信信号の受信レベルを測定する第2の測定部と、第2の測定部が測定した受信レベルがあらかじめ決められたウィンドウ内にある場合に、第2の受信部が受信する通信信号を利用し、第2の測定部が測定した受信レベルがあらかじめ決められたウィンドウ内にない場合に、第2の受信部が受信する通信信号を利用しない第2の制御部7とを備える。
(もっと読む)
21 - 30 / 905
[ Back to top ]