
株式会社国際電気通信基礎技術研究所により出願された特許
31 - 40 / 905
価格決定装置、価格決定システム、価格決定プログラムおよび価格決定方法
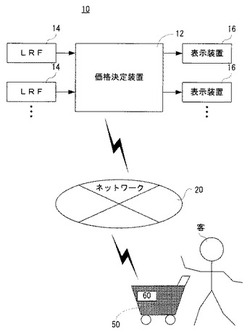
【解決手段】価格決定装置12はCPUを含み、CPUは、複数のLRF14の出力に基づいて、買い物する客の移動軌跡を検出する。CPUは、客の移動軌跡に基づいて、当該客の行動が予め登録された大局的な行動であると推定すると、当該大局的な行動に対応して予め登録された商品についての価格を特別価格に変更する。
【効果】客毎に価格を可変的に設定するので、バリエーションの豊富なサービスを提供することができる。
(もっと読む)
流れ状態判別装置、流れ状態判別方法、流れ状態判別プログラムおよびそれらを用いたロボット制御システム

【構成】 ロボット制御システム100は、中央制御装置10、ロボット12および位置検出システム14を含む。中央制御装置10は、代表移動軌跡に関する情報を記憶する流れデータベース118を備え、大量に蓄積された人々の移動行動情報、および位置検出システム14によって随時検出される環境内の人(96)の位置履歴を利用して、代表移動軌跡ごとに人の流れの状態を判別し、環境内における人の流れの発生、終息および継続などを予測する。そして、中央制御装置10によって予測された人の流れ情報に基づいて、ロボット12の行動が決定される。
【効果】 予め環境内に設定した代表移動軌跡の流れの状態を判別することによって、環境内における人の流れを予測できるので、人の流れに応じた自然な行動をロボットに実行させることができる。
(もっと読む)
制御装置、それにおいて実行されるプログラム、およびその制御装置を備えた通信システム
【課題】起動用のウェイクアップ信号が直接届かない環境においても基地局を確実に起動できる制御装置を提供する。
【解決手段】基地局1は、端末装置4から端末装置6宛てのデータパケットを受信すると、基地局3への通信を開始する開始信号を制御装置7へ送信する。制御装置7は、開始信号に応じて、ウェイクアップ信号を生成して送信するように基地局2を制御するための制御信号CTL2を生成して基地局2へ送信する。基地局2は、制御信号CTL2に応じてウェイクアップ信号を無線通信によって基地局3へ送信し、基地局3をウェイクアップさせる。基地局1は、基地局3がウェイクアップすると、データパケットを基地局3へ送信する。
(もっと読む)
歩行者の軌跡を予測して自己の回避行動を決定するロボット
【課題】周囲の通行への影響を抑制しながら歩行者と安全にすれ違う。
【解決手段】自律的に行動するロボットRは、自己とすれ違う歩行者Thの軌跡を示す歩行者モデルを記憶しており、自己および歩行者Thの位置を検出して、検出結果および歩行者モデルに基づいて自己とすれ違う歩行者Thの軌跡を予測し、予測結果に応じて自己の回避行動を決定する。
(もっと読む)
無線中継装置、仮想マシン作成サーバ、無線中継方法、および仮想マシン作成方法
【課題】他の通信事業者のコアネットワークに接続する場合に、各ホップのリモート部に対応する制御装置の導入が必要であった。
【解決手段】無線方式Aのサービスに必要となる各制御装置の仮想マシンの起動要求を、仮想マシンを作成する仮想マシン作成サーバに送信する起動要求送信部と、前記起動要求の送信に対して、前記仮想マシン作成サーバから前記仮想マシンの起動完了の報告であり、前記仮想マシンと通信するための通信先を示す通信先情報を含む起動完了報告を受信する起動完了報告受信部と、前記1以上の各起動完了報告が有する通信先情報を含む設定情報を、当該通信先情報に対応する仮想マシンではない他の仮想マシンに送信する設定情報送信部とを具備する無線中継装置により、他の通信事業者のコアネットワークに接続する場合に、設備投資コストの大幅な削減が可能となる。
(もっと読む)
無線装置
【課題】アクセスカテゴリ間で端末数に偏りがある場合も、スループットの低下を抑制し、優先度制御を正確に行うことが可能な無線装置を提供する。
【解決手段】制御手段4は、アクセスカテゴリACiのチャネル占有率ATRが基準値ATRminよりも小さいとき、未使用の帯域を別のアクセスカテゴリに割り当てるようにコンテンションウィンドの値を前回の値よりも大きい値に設定する。また、制御手段4は、チャネル占有率ATRが基準値ATRmax以上であるとき、増加したトラフィック量でパケットを送信できるようにコンテンションウィンドの値を前回の値よりも小さい値に設定する。そして、通信手段2は、制御手段4によって設定されたコンテンションウィンドを用いて各アクセスカテゴリのパケットを送信する。
(もっと読む)
脳活動情報出力装置、脳活動情報出力方法、およびプログラム
【課題】従来、精度高く脳活動を推定することができなかった。
【解決手段】脳活動時光強度情報を複数の波長ごとに取得する脳活動時光強度情報取得部と、安静時光強度情報と脳活動時光強度情報とから、複数の波長ごと、およびプローブセットごとに、光強度の変化に関する情報である光強度変化情報を取得する光強度変化情報取得部と、複数の波長ごと、およびプローブセットごとの光強度変化情報を、大脳皮質活動モデル情報と頭皮血流変化モデル情報に適用し、大脳皮質と頭皮の血管のオキシヘモグロビンとデオキシヘモグロビンの濃度変化を取得する推定部と、大脳皮質のオキシヘモグロビンとデオキシヘモグロビンの濃度変化を出力する出力部とを具備する脳活動情報出力装置により、精度高く脳活動を推定できる。
(もっと読む)
音響モデル学習装置及びコンピュータプログラム
【課題】SVMを用いた音響モデルの学習装置を提供する。
【解決手段】学習装置は、学習データ記憶部102と、各音素の内部状態のSVMパラメータを記憶するSVMパラメータ記憶部116と、学習データの各々と、対応する音響モデル内の内部状態との間を初期アライメントする初期アライメント処理部110と、初期アライメント済の学習データを記憶する、書換え可能な記憶部112と、アライメント済の学習データを用いて音響モデルの各内部状態のSVMの学習を行なうアライメント処理部118と、学習データの各々について、SVM学習部114により学習された音響モデルを用いて各音響モデル内の内部状態とアライメントを行ない、記憶部112の学習データを更新する学習データ更新部122と、終了条件が成立するまで、SVM学習と学習データのアライメントとを繰返し実行させる比較部126とを含む。
(もっと読む)
ルートパースペクティブモデル構築方法およびロボット
【課題】 人の理解に適した仕方で路について対話する。
【解決手段】 ロボット(10)は、座標系(x,y)が定義された地図上のルートに従って環境内の路を移動しながら自己位置の検出および路上視の撮影を行うことによって位置情報および画像情報を収集し(S27)、収集した画像情報からランドマークを検出し(S43)、検出したランドマークを含む路上視の視点位置を収集した位置情報に基づいて特定し(S47)、そして検出したランドマークを特定した視点位置に従ってルートに割り付ける(S51,S77)。その後、こうして得られたルートパースペクティブモデルに基づいて路について対話する(S131〜S141)。
(もっと読む)
制御装置
【課題】ネットワークへの悪影響を回避してアクセスポイントをスリープさせる制御装置を提供する。
【解決手段】アクセスポイント42,44,45,47,49は、それぞれ、無線通信範囲REG42,REG44,REG45,REG47,REG49を有する。そして、アクセスポイント44の無線通信範囲REG44は、他の複数のアクセスポイント42,45,47,49の複数の無線通信範囲REG42,REG45,REG47,REG49によって覆われている。ネットワーク上に配置された制御装置は、複数のアクセスポイント42,44,45,47,49のうち、アクセスポイント44をスリープさせる。
(もっと読む)
31 - 40 / 905
[ Back to top ]