
株式会社国際電気通信基礎技術研究所により出願された特許
61 - 70 / 905
移動体遠隔操縦システムおよびそのための制御プログラム
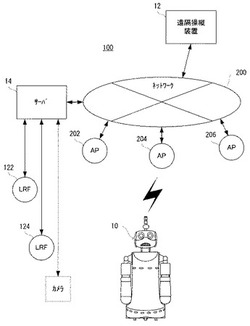
【課題】 通信障害領域が存在する環境でも、簡単な構成で移動体を安全に遠隔操縦可能にする。
【解決手段】 移動ロボット遠隔操縦システム100はCPU(80,20,40)およびメモリ(84,22,42)を含み、メモリの保存領域(170,130,150)には地図情報(138)が、一時記憶領域(180,140,160)には地図情報に対応する区域内で無線通信に障害が生じる通信障害領域(IO1〜IO5)を示す情報が仮想障害物情報(148)として記憶される。CPUは、センサ(122,124,40,46,58,70,112a,112b)からの情報に基づいて、地図情報に対応する区域での移動ロボット10の少なくとも位置を検出し(S1,S5)、地図情報および仮想障害物情報と検出結果とに少なくとも基づいて、通信障害領域を回避するように移動体を移動させる移動制御情報(182a)を作成する(S75,S105)。
(もっと読む)
インピーダンス自動整合回路

【課題】アンテナと受信回路との間のインピーダンスを整合させるインピーダンス自動整合回路を提供する。
【解決手段】アンテナ11と受信回路21との間に配設されるインピーダンス自動整合回路1であって、アンテナ11と受信回路21との間に存在し、両者のインピーダンスを整合させる整合回路12と、反射量測定用の基準信号を、受信回路21が受信する受信信号と干渉しないように送信する基準信号送信部16と、アンテナ11からの信号のうち、基準信号に対する反射の信号である反射信号を用いて、受信回路21の受信周波数における反射量を取得し、取得した反射量を用いて整合回路12を制御することにより、アンテナ11と受信回路21との間のインピーダンスを整合させる制御部17と、を備える。
(もっと読む)
関係推定装置、関係推定システム、関係推定プログラムおよび関係推定方法
【構成】関係推定システム100は、複数のLRF12を備える中央制御装置10を有する。LRF12は、たとえば、ショッピングモールの通路を通る人々の位置を検出する。この通路には、特に人通りが多い場所や、人が密集する場所が特定領域SAとして設定される。そして、複数の人間の位置のそれぞれが特定領域SAに含まれているかが判断され、中央制御装置10は、特定領域SAに含まれていない人間の移動軌跡データに基づいて、人間関係の有無を推定する。
【効果】関係推定システム100は、無関係な人々が頻繁に行き交ったり、集まったりする場所を除いて、人間関係を推定することができる。そのため、人々の人間関係を精度よく推定することができるようになる。
(もっと読む)
無線装置およびそれを備えた無線通信システム
【課題】送信レートが異なる複数のリンクを用いて送信された複数のデータを効率良く中継可能な無線装置を提供する。
【解決手段】無線装置10は、無線装置20の送信データ“1101”から無線装置30への送信フレーム長(=4ビット)を有する送信データ“1101”を抽出し、無線装置30の送信データ“1011”から無線装置20への送信フレーム長(=2ビット)を有する送信データ“10”を抽出する。無線装置10は、“1101”を“11100010”にチャネルコーディングし、“10”を“1101”にチャネルコーディングする。そして、無線装置10は、“1101”を“11110011”にポストコーディングし、“11100010”と“11110011”との排他的論理和を演算し、その演算結果“00010001”を変調して無線装置20,30へ送信する。
(もっと読む)
学習支援装置、学習支援方法、及びプログラム
【課題】学習者が苦手な問題を多く有する問題群を選択する学習支援装置を提供する。
【解決手段】問題群IDと問題IDとを対応付ける問題群対応情報が記憶される問題群対応情報記憶部12、問題IDと、問題の属性をそれぞれ示す複数のメタデータ項目を特定するメタデータとを対応付けるメタデータ対応情報が記憶されるメタデータ対応情報記憶部13、問題IDとスコアとを対応付けるスコア対応情報が記憶されるスコア対応情報記憶部14、メタデータ対応情報とスコア対応情報を用いて、メタデータ項目ごとの正答率を算出する正答率算出部20、正答率の低いメタデータ項目を特定するメタデータ項目特定部22、問題群対応情報とメタデータ対応情報を用いて、特定されたメタデータ項目を有する問題の比率の高い問題群を選択する問題群選択部24、その選択結果を出力する出力部26を備える。
(もっと読む)
移動ロボット
【解決手段】移動ロボット10は、移動速度データベース88を含み、人と共存する様々な環境内を自律的に移動する。移動速度データベース88には、人の移動速度の傾向を表す代表値に応じて定められる最大移動速度が、環境内の各エリアのそれぞれと対応付けて記憶される。移動ロボット10は、移動する際には、現在地に対応する最大移動速度を移動速度データベース88から読み出して設定し、設定した最大移動速度を上限とした移動速度となるように移動する。
【効果】周囲の人と調和した移動が可能となるので、周囲の人の邪魔になることなくスムーズに移動できる。
(もっと読む)
アンドロイド制御システム
【構成】 アンドロイド制御システム10はアンドロイド12を含み、アンドロイド12は人間の代役として或る場所に配置される。通常、アンドロイド12は、制御装置14の制御に従って、人間との間で対話するなどのコミュニケーションを図る。ただし、アンドロイド12自身が対応できない場合には、その旨を遠隔オペレータに通知する。かかる場合には、遠隔オペレータの指示に従って、アンドロイド12は動作される。また、アンドロイド12は、たとえば、その近傍や周囲に人間が存在しない場合や遠隔オペレータからの指示がない場合には、制御装置14の制御に従って無意識動作を実行する。つまり、瞬きや呼吸のような生理的な動作をしたり、髪を触るなどの癖による動作をしたりする。
【効果】 無意識動作のようなアンドロイド特有の動作を実現できる。
(もっと読む)
ロボットの移動制御システム、ロボットの移動制御プログラムおよびロボットの移動制御方法
【構成】移動制御システム100は、役割データベース(20)を備える中央制御装置10および役割が設定されたロボット14を有する。また、役割データベース(20)は、役割を持った人間の代表移動行動データから構成される。たとえば、ロボット14に「話しかけやすい警備員」の役割が設定されている場合、「話しかけやすい警備員」の代表移動行動データが役割データベース(20)から選択される。また、中央制御装置10では、役割が設定されたロボット14の複数の将来位置および各将来位置における行動が代表移動行動データに基づいて予測され、予測された複数の行動のそれぞれの発生確率が算出される。そして、算出された発生確率に基づいて、ロボット14に移動行動が指示される。
【効果】システムの管理者は、役割が設定されたロボット14を、同じ役割を持った人間と同じように動作させることができる。
(もっと読む)
音声言語識別装置の学習装置、音声言語の識別装置、及びそれらのためのプログラム
【課題】発話データから、その発話の言語を信頼性高く識別できる音声言語の識別装置を提供する。
【解決手段】学習装置は、言語ラベル付の音声データの記憶装置、これら音声データについて、所定時間長かつ所定シフト長の音声特徴の系列を抽出するブロック特徴生成部180、抽出された音声特徴の系列からコードブックを生成するコードブック算出部184、複数の音声データの各々について、当該音声データから得られた音声特徴の系列に含まれる音声特徴と最も近い代表ベクトルをコードブックから求め、その分布に基づいて当該音声データの言語ラベル付音声言語特徴を生成する言語音素特徴ベクトル算出部186、及びこの音声言語特徴を学習データとして、音声言語特徴から言語を推定するためのSVMを生成するSVM学習部190を含む。
(もっと読む)
携帯型ナビゲーション装置
【構成】 携帯型ナビゲーション装置(10)は、ユーザによって保持されて、ユーザの移動と共に移動する。移動中に、カメラで撮影した動画像データを画像処理することによって、ユーザが通った移動経路中のトイレやコンビニのような特定施設を探索して記録しておく。ユーザが希望するとき、当該特定施設の最寄りの検出地点を、たとえば表示器によってユーザに提示する。
【効果】ユーザが見落とした特定施設を提示できる。
(もっと読む)
61 - 70 / 905
[ Back to top ]