
エービービー エービーにより出願された特許
1 - 2 / 2
シリコンを結晶化させる装置及び方法
シリコン結晶化装置は、シリコンを収容する坩堝(11)と、前記坩堝に収容される前記シリコンを溶融させ、続いて前記溶融シリコンを凝固させるように設けられている加熱/熱放散機構(13〜15)と、前記坩堝内の前記溶融シリコンを、前記溶融シリコンの凝固過程で撹拌するように設けられている電磁撹拌装置(17)とを備える。制御機構(18)は、前記加熱/熱放散機構を制御して、前記溶融シリコンを指定凝固速度で凝固させ、前記電磁撹拌装置を制御して、前記溶融シリコンを前記溶融シリコンの前記指定凝固速度に応じて撹拌することにより、前記溶融シリコンの速度と前記指定凝固速度との比が、第1の閾値を上回るようになるように設けられている。 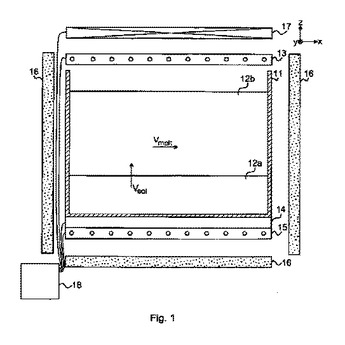 (もっと読む)
(もっと読む)
複数の相互作用ロボットをオフラインでプログラミングする方法及びシステム
複数の相互作用ロボットをオフラインでプログラミングする方法及び装置を開示する。例えば、複数の相互作用ロボットをオフラインでプログラミングするシステム(100)は、複数の相互作用ロボット(131〜133)のプログラムコード(111)をオフラインでプログラミングし、そして検証するコンピュータ(110)と、コンピュータ(110)に接続されてプログラムコード群の内の少なくとも一つのコードのダウンロードを受信して実行するロボットコントローラ(120)と、を含む。複数の相互作用ロボット(131〜133)はロボットコントローラ(120)によって制御することができる。 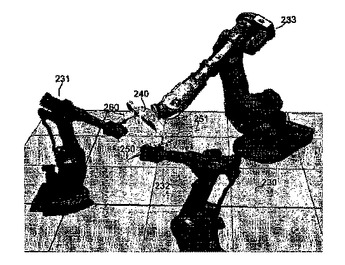 (もっと読む)
(もっと読む)
1 - 2 / 2
[ Back to top ]