
ハネウェル・インターナショナル・インコーポレーテッドにより出願された特許
21 - 30 / 1,504
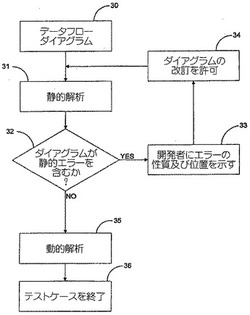
要求ベーステスト生成
【課題】モデルの情報から作成されるテストケースを使用して、実装システムがモデルに従っていることを検証する。
【解決手段】データフローダイアグラム30をインポートして静的分析31を実行する。ダイアグラムが静的エラーを含むか判断し(32)、ダイアグラムが静的エラーを含む場合、それらのエラーの性質及び位置を開発者に示し(33)、開発者はその後、静的分析が再実行される前に静的エラーを修正するためにダイアグラムを改訂する機会を与えられる(34)。ダイアグラムが静的エラーを含まない場合、ダイアグラムは、動的分析35にかけられ、そのモデルに対する完全なテストケースセットが出力される(36)。
(もっと読む)
テーパー付きクリンプジョイントを備える電磁コイルアセンブリおよびそれを製造する方法

【課題】高温度の動作環境での使用に好適な電磁コイルセンブリを提供する。
【解決手段】電磁コイルアセンブリ10は、コイル状マグネットワイヤ22と、コイル状マグネットワイヤ22の少なくとも一部を囲う無機電気絶縁本体24と、無機電気絶縁本体24内にコイル状マグネットワイヤ22へ延びるリードワイヤ30と、無機電気絶縁本体24内に埋め込まれる第1テーパー付きクリンプジョイント32と、を有する。第1テーパー付きクリンプジョイント32は、リードワイヤ30をコイル状マグネットワイヤ22へ機械的および電気的に接続する。
(もっと読む)
バイアスがかかった測定値に基づいた衛星航法システムの誤り検出
【課題】本明細書で開示される例示的な実施形態は、衛星航法システム用の受信機において誤りを検出するための方法を提供する。
【解決手段】方法は、位置解に対応する複数の測定残差を計算するステップと、検定統計量を形成するために、複数の測定残差を結合するステップとを含む。方法は、検定統計量に対応する閾値を計算するステップであって、フォールスアラームの所望の確率に対応する、可能な検定統計量の非心カイ2乗分布に属する値となるように、閾値を選択するステップを含む、ステップも含む。検定統計量は、閾値と比較され、検定統計量が閾値よりも大きい場合、位置解に誤りがあることを示すアラームを出力することと、位置解を廃棄することのうち、少なくとも一方を実行する。
(もっと読む)
共振器ファイバ光ジャイロスコープ強度変調コントロールのためのシステムと方法
【課題】高速、低損失で安価な共振器ファイバ光ジャイロスコープ強度変調コントロールのためのシステムを提供する。
【解決手段】共振器ファイバ光ジャイロ(RFOG)における強度変調を制御するための方法であって、共振検出変調周波数で生成される正弦波リファレンスを用いて光線のデジタル・サンプルを復調することによって、強度変調エラー信号を生成するステップと、前記強度変調エラー信号から正弦波フィードバック制御信号を生成するステップと、前記正弦波フィードバック制御信号で強度モジュレータを駆動するステップであって、前記強度モジュレータは前記光線から残余の強度変調をキャンセルする、ステップと、を含む。
(もっと読む)
飽和分光法のための単純な低電力マイクロシステム
【課題】光学ビームの周波数を安定化する分光器アセンブリを提供する。
【解決手段】分光器アセンブリ7は熱分離プラットフォーム400、ガス41を囲い、熱分離プラットフォームに取り付けられるガス参照セル40を含み、ガス参照セルは、少なくとも1つの光学透明窓415、囲まれるガスの温度を上昇させるように構成される少なくとも1つのヒーターを備える。ビームスプリッタ30が、レーザー10から放射される入力光学ビームの一部が反射されてガス参照セルの少なくとも1つの光学透明窓に入射するように構成される場合、入力光学ビーム20の反射された部分は、ガスを二度通過する。検出器350がガスを二度通過した光学ビームを受け取るように構成される場合、レーザーを安定化させるために、レーザーにフィードバック信号50が提供される。
(もっと読む)
集積回路チップ上にセンサを垂直に積み重ねるためのシステムおよび方法
【課題】サイズが縮小され、熱検知性能が改善された検知装置パッケージ(20)を提供すること。
【解決手段】例示的パッケージは、複数のパターン、特定用途向け集積回路(アナログASIC)チップ(26)、および微小電気機械システム(MEMS)のダイ上に形成された微細機械加工されたセンサ(28)を有するプリント回路板(24)を含む。アナログASICチップは、プリント回路板に電気的かつ機械的に取り付けられる。MEMSのダイは、プリント回路板のパターンの一部分とのみ直接的に電気通信し、アナログASICチップに機械的かつ熱的に直接取り付けられる。MEMSのダイとアナログASICチップの間に熱伝導化合物(36)が配置される。1つまたは複数のはんだボール(32)が、アナログASICチップをプリント回路板に電気的に取り付け、1つまたは複数のはんだパターンが、MEMSのダイをプリント回路板に電気的に取り付ける。
(もっと読む)
リアクションホイールを使用して姿勢を調節するための方法およびシステム
【課題】航行体114に搭載されたリアクションホイール230を使用して、航行体114の姿勢を制御するための方法およびシステムを提供すること。
【解決手段】1つの例示的な方法は、リアクションホイール230を使用して航行体114の姿勢を調節するためのトルク指令値を受信するステップと、トルク指令値に少なくとも部分的に基づいてリアクションホイール230の位相誤差を決定するステップと、位相誤差に基づいてリアクションホイール230のモータトルク指令値を決定するステップとを含む。モータトルク指令値は、対応するトルクをリアクションホイール230のロータ234にかけるために、リアクションホイール230の電気モータ232に供給される。モータトルク指令値の大きさと位相誤差の大きさとの間の関係は、非線形である。例示的な実施形態では、モータトルク指令値の大きさは、リアクションホイール230が期待位置よりも閾値を上回る量だけ遅れているとき、少なくとも瞬時に、静摩擦トルクを上回る。
(もっと読む)
蒸気セル原子時計物理パッケージ
【課題】チップスケール原子時計物理パッケージを提供すること。
【解決手段】このチップスケール原子時計物理パッケージは、空洞部を画定する本体と、空洞部内に実装される第1の台座とを含む。レーザーは、第1の台座の第1の表面上に実装される。第2の台座も、空洞部内に実装される。第2の台座は、その第1の表面が第1の台座に対向するように配置される。第1の光検出器は、第2の台座の第1の表面上に実装される。蒸気セルは、第2の台座の第1の表面上に実装される。波長板も含まれ、レーザーからの光線が、波長板および蒸気セルを通って伝播し、第1の光検出器により検出することができるように、レーザー、波長板、第1の光検出器、および蒸気セルが配置される。蓋部も空洞部を覆うのに含まれる。
(もっと読む)
向上した始動中の速度推定のためのジャイロスコープの動的モータ振幅補償
【課題】電力供給後の始動段階において、速やかに正確な速度情報をもたらすことができるジャイロスコープ装置のシステムおよび方法を提供する。
【解決手段】始動中のジャイロスコープ110の動的モータ振幅補償のためのシステムは、始動中のジャイロスコープのモータ振幅成長のモデルに基づいて、アプリオリのモータ振幅信号122を生成するように構成されたアプリオリのモータ振幅モジュール120と、定常状態のスケール係数モジュール124と、アプリオリのモータ振幅信号および定常状態のスケール係数信号を受けるように構成された動的モータ振幅補償モジュール128とを含む。動的モータ振幅補償モジュールは、ジャイロスコープからの測定されたモータ振幅信号116、アプリオリのモータ振幅信号、を受け、始動段階の間に、検出された速度信号に適用される時変スケール係数130を出力する。
(もっと読む)
水平に向けられた駆動電極を有するMEMSジャイロスコープ
【課題】MEMS(微細電気機械システム;microelectromechanical system)ジャイロスコープのレートバイアス誤差及びスケールファクタ誤差を減らすデバイス及び方法を開示する。
【解決手段】1つ又は複数の水平駆動電極92、94、96、98を含む少なくとも1つの基板68と、1つ又は複数の水平駆動電極92、94、96、98から垂直に間隔をあけられ、これに隣接する可動電極64、66とを含めることができる。水平駆動電極92、94、96、98及び/又は可動電極64、66は、デバイスの感知軸72の方向での可動電極64、66の変位から生じるレートバイアス誤差及びスケールファクタ誤差をなくすか減らすように構成することができる。
(もっと読む)
21 - 30 / 1,504
[ Back to top ]