
旭光電機株式会社により出願された特許
1 - 10 / 45
インタラクション操作システム
【課題】 操作者の動作とロボットの検知する感覚情報が互いに影響しあう非拘束、かつ、直観的連動的なロボット操作システムの提供
【解決手段】 ロボット側には感覚情報を検出する感覚情報検出部と、感覚情報を伝送する感覚情報出力部と、ロボットを駆動させるロボット駆動装置を備え、操作者にはロボットから伝送された前記感覚情報を操作者に付与する感覚情報付与部、並びに多関節構造体、制御装置及び教示情報出力部より成るロボット教示装置を装着し、前記多関節構造体は可動部に変化量検出センサを有する関節を含む関節群とセンサ信号を処理する処理部と処理されたデータを伝送する通信部とにより構成されることにより、操作者の動作を拘束せず、かつ、操作者の身体的条件を問わずにロボットの操作を行うことができるシステムが実現する。
(もっと読む)
検知範囲を自由に設定できる物体検出装置

【課題】検知範囲を自由に設定できる、空間での物体検出が可能な物体検出装置の提供。
【解決手段】物体検出装置100は、複数の光センサユニットSU及び1つの中央制御部115を有している。光センサユニットSUでは、複数の光センサ部111と1つのユニット制御部113とが、光センサ用接続線L111を介してスター型に接続されている。1つのグループラインGLに属するユニット制御部113は、ユニット制御部用接続線L113を介してカスケード型に接続される。カスケード型に接続されるユニット制御部113の一つは、ユニット制御部用接続線L113を介して中央制御部115に接続される。フレキシブル性を有する光センサ用接続線L111及びユニット制御部用接続線L113を用いることによって、設置場所の形状に合わせて、自由に光センサ部111及びユニット制御部113を配置し、設置場所での検知範囲を自由に設定することができる。
(もっと読む)
近赤外線及び遠赤外線を用いる物体検知装置
【課題】 物体を適切に検知することができる物体検出装置の提供
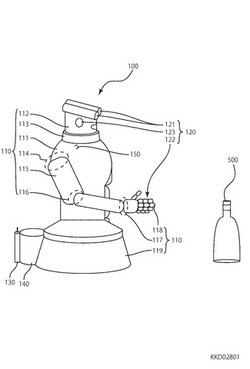
【解決手段】 自動ドアセンサ100は、近赤外線センサ部100A、遠赤外線センサ部100B及び制御部100Cを有している。近赤外線センサ部100Aは、近赤外線を用いて近赤外線検知領域R110に物体が存在するか否かを検知する。近赤外線センサ部100Aは、複数の近赤外線投光領域を形成することによって、物体の存在、物体の検知位置、物体の移動方向を検知する。遠赤外線センサ部100Bは、遠赤外線検知領域R130からの遠赤外線を受光することによって、遠赤外線検知領域R130に人が存在するか否かを検知する。制御部100Cは、近赤外線センサ部100A及び遠赤外線センサ部100Bの検知結果に基づいて、自動ドアシステム50のドアパネル55a、55bを開閉するための所定の信号を発生する。
(もっと読む)
細胞集合体選別取得装置及び細胞集合体の選別取得方法
【課題】 自動的に細胞集合体を選別取得する細胞集合体選別取得装置を提供
【解決手段】 細胞集合体選別取得装置100は、定期的な培地交換の時間になると、テーブル111に載置されているマイクロプレート101のウェルを処理位置に配置させ、培地除去装置132を各ウェルの培地Mの内部に位置させ、ウェル内の培地Mを除去し、細胞集合体Cを一時的に培地Mから露出させる。そして、カメラ装置133を動作させて、細胞集合体画像を取得し、細胞集合体画像から細胞集合体の位置、大きさを判断する。そして、細胞集合体Cが所定以上の大きさであると判断すると、マイクロハンド134を用いて細胞集合体Cをウェルから取得し、収集トレイ135へ移動させる。これにより、所定の状態に培養された細胞集合体Cを自動的に取得できる。細胞集合体Cが所定の状態にないと判断すると、培地注入装置131によってウェルの内部に新しい培地Mを注入する。
(もっと読む)
物体認識方法及び物体認識装置
【課題】所定領域内の物体の有無のみを検知するセンサを利用しながら物体の有無に加えて物体の状態も認識する。
【解決手段】検出対象領域の物理量を検出可能な位置に第1センサ101及び第2センサ102の2つのセンサを設置して、検出対象領域を形成する複数の検出ブロック領域の各領域内の物体の有無を2つのセンサで計測し、第1センサ101のみによって物体を検出した検出ブロック領域を第1スポット、第2センサ102のみによって物体を検出した検出ブロック領域を第2スポット、第1センサ101及び第2センサ102の両方によって物体を検出した検出ブロック領域を共通スポットとして加工データを生成、検出したスポットとセンサの位置関係から物体の高さを取得し、検出された共通スポットの数及び形状とに基づいて物体の大きさを判定することによって、物体が人である場合にその存在に加えて四つん這い等を含むその人の状態も正しく認識する。
(もっと読む)
双方向型物体検知センサ
【課題】 双方向で投受光することが可能な双方向型物体検知センサ、同一構造で互換性のある双方向型物体検知センサ、受光信号を同一投受光装置内や別の投受光装置における投光信号に加えることが可能な双方向型物体検知センサの提供。
【解決手段】 少なくとも投光器と受光器と投光制御部と受光制御部を有する単位投受光器が、対向してまたは並行に複数配置された1組の投受光装置であって、一方の単位投受光器の投光光は他方の単位投受光器により受光され、当該他方の単位投受光器の投光光は前記一方の単位投受光器により受光され、かつ、前記各単位投受光器における投光器の向きと受光器の向きが同一である双方向型物体検知センサを提供する。
(もっと読む)
分析試料保持装置、試料分析装置、及び分析試料保持装置の製造方法
【課題】所定の試料を比色分析するのに適した、小型の
分析試料保持装置及び試料分析装置を提供する。
【解決手段】回折格子G101に侵入した分析光r5は、回折格子G101によって分光され、分光された分析光r6として、第1基材部101の表面P101に形成される分析光導出部A101に向かって垂直に進行する。このように、生体試料分析チップの内部に回折格子G101を配置することによって、生体試料分析チップに投光する前に、白色光から所定波長の分析光を分光する必要がない。また、分析の項目に対応する所定波長の分析光を発光する光源を複数用意しておく必要もない。よって、分析装置を小型にすることができる。
(もっと読む)
分析試料保持装置及び分析試料保持装置の製造方法
【課題】 小型で安価な分析試料保持装置の提供
【解決手段】 生体試料分析チップ100は、透明なポリマー樹脂、例えばポリカーボネイトからなる第1基材部101、第2基材部103を有している。生体試料分析チップ100は、第1反射面M101、第2反射面M102を有する第1基材部101と、第3反射面M103、第4反射面M104を有する第2基材部103を接合して形成される。安価な樹脂を用いた一般的な接合技術により製造できるので、安価な生体試料分析チップ100を製造することができる。生体試料分析チップ100では、分析光を生体試料分析チップ100の内部において複数回反射させる。よって、分析光r2〜r5の試料保持路R100の内部の進行長さによって、最低限、比色分析に必要とされる量の分析光を吸収できる長さ(最低限長さ)を確保できる。
(もっと読む)
指接触により動作教示可能となる動作教示装置
【課題】 使用者に負担をかけることなく効率的に教示作業を行うことができる動作教示装置の提供
【解決手段】 静電容量スイッチ111は、把持部110を掌及び第三指〜第五指によって把持した際に、第三指又は第四指が自然に位置する場所に配置されている。よって、使用者は把持部110を把持するだけで、ティーチング装置100を動作教示可能状態とすることができる。つまり、ティーチング装置100を動作教示可能状態とするにあたり使用者に特別な操作を要求しないので、動作教示にあたり使用者の操作負担を軽減することができる。圧力スイッチ113は、静電容量スイッチ111の近傍、把持部110を掌及び第三指〜第五指によって把持した際に、第三指又は第四指が自然と位置する場所に配置される。これにより、使用者は、通常のイネーブルスイッチと同様に、把持部110を強く握る動作をするだけで、動作入力不可能状態とすることができる。
(もっと読む)
流体検知センサ及び分光分析装置
【課題】 流体の非侵襲的分析において、簡易な構成で分解能を向上させる。
【解決手段】 流体物が流通する透光性のチューブ13の外側に着脱自在に設けられる流体検知センサ1であって、単一のピーク波長を有する光を出射する、発光素子18a〜18fと、発光素子18a〜18fの光が出射される光出射端111aからチューブ13を間に挟んで一定距離離れた場所に配置された、互いに独立した複数の受光面123aを有する受光素子19と、チューブ13と受光素子19との間又は光出射端111aとチューブ13との間に配置されたプリズム17とを備え、受光素子19は、プリズム17により分光された光をそれぞれ異なる受光面123aで受光する。
(もっと読む)
1 - 10 / 45
[ Back to top ]