
株式会社デンソーウェーブにより出願された特許
131 - 140 / 1,155
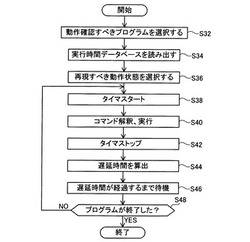
携帯機器とプログラム実行装置を有するシステムと、そのシステムに用いられる携帯機器及びプログラム実行装置
【課題】 プログラムを実行するときの携帯機器の動作を、動作速度を含めて再現することができるシステムを提供する。
【解決手段】 携帯機器とプログラム実行装置を有するシステム。携帯機器は、プログラムを実行しているときに、当該プログラム中の予め決められたコマンドを実行するのに要する時間である実行時間を計測するコマンド実行時間計測手段と、計測した実行時間のデータをプログラム実行装置に送信する送信手段を有している。プログラム実行装置は、受信されたデータにおいて実行時間が定められているコマンドを実行する際に当該コマンドについて定められている実行時間より短い時間で当該コマンドを実行したときは、当該コマンドの実行開始時点から当該コマンドについて定められている実行時間が経過するのを待ってから次のコマンドを実行する。
(もっと読む)
ロボットの制御方法およびロボットの制御装置

【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、ツールの先端が現在位置から目標位置に移動する際に要する移動時間に基づく第1評価指標を設定し、その第1評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
ロボットの制御方法およびロボットの制御装置
【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、ツールの先端が現在位置から目標位置に移動する際に要する移動時間に基づく評価指標を設定し、その評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
6軸ロボットの軸間オフセット検出方法
【課題】6軸ロボットにおいて、軸間オフセットのずれ量を計測しこれを補正する。
【解決手段】手先に発光ダイオードを設け、手先をロボット座標のX(Xb)軸上の複数の移動目標位置に移動させる。このとき、発光ダイオードの位置を3次元計測器により計測し、移動目標位置と実際の移動位置との誤差を基にして軸間オフセット量Fを検出する。この軸間オフセット量FによってDHパラメータを補正する。
(もっと読む)
コードリーダ
【課題】ユーザによるデータの誤認を適切に抑制することができるコードリーダを提供する。
【解決手段】コードリーダであって、読取範囲内に存在する対象物の光学的特性分布を検出する手段と、光学的特性分布に基づいて情報コードの位置を検出する手段と、光学的特性分布に基づいて読取範囲内の情報コードをデコードし、得られたデータを出力するデコード手段と、デコード条件の記憶手段を有している。デコード手段は、読取範囲の中の第1の範囲内にある情報コードに対して第1のデコード条件を用いてデコードし、読取範囲の中の第2の範囲内にある情報コードに対してより厳しい第2のデコード条件を用いてデコードし、第1の範囲内の情報コードをデコードできたときには、第1の範囲内の情報コードのデータを出力して第2の範囲内の情報コードのデータを出力しない。
(もっと読む)
電動ハンド
【課題】大型化を避けつつ、一対の把持部材の閉じ方向および開き方向のいずれの移動でも把持対象物を把持でき、且つ、停電時にも把持力を失うことがない電動ハンドを提供する。
【解決手段】サーボモータ1と回転軸2とが並列配置となっているので、全体として長尺とならず、小型に構成できる。回転軸2の右ねじ18と左ねじ19にボールナットからなる直動部材3,4を螺合し、回転軸2によって直動部材3,4が互いに反対方向に移動するようになる。そして、直動部材3,4の互いに接近する方向の移動を、第1の連結部材28,29または第2の連結部材によってスライダ24,26の接近する方向の移動または互いに離反する方向の移動に変換し、スライダ24,25に取り付けられる把持部材の閉じ方向の移動および開き方向の移動によって把持対象物を把持する。
(もっと読む)
ロボットの制御方法およびロボットの制御装置
【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、現在位置における各軸の回転角度を基準とした各軸の回転角度の変化量を示す各軸移動距離に基づく第1評価指標を設定し、ツールの先端位置を変化させないという束縛条件の下で、その第1評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
ロボットの制御方法およびロボットの制御装置
【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、ツールの先端が現在位置から目標位置に移動する際に要する移動時間に基づく評価指標を設定し、その評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
充電システム
【課題】ストラップが取り付けられた携帯機器を充電する充電システムにおいて、ストラップの挟み込みをより確実に防止しうる構成をより簡易に実現する。
【解決手段】充電システム1では、充電装置30の充電台31が、底壁部34の前端側から前壁部35が立ち上がり、底壁部34の後端側から後壁部36が立ち上がるように構成されている。また、前壁部35において切り欠き形状のストラップ案内部38が設けられている。更に、携帯機器10が充電台31に載置されたときに、ストラップ20をストラップ案内部38に通し且つ少なくともストラップ本体22を充電台31の外部に配置し得るように構成されている。
(もっと読む)
ロボットの制御方法およびロボットの制御装置
【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、ツールの先端が現在位置から目標位置に移動する際に要する移動時間と、移動後のツールの先端位置の目標位置に対する位置誤差とに基づく評価指標を設定し、その評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
131 - 140 / 1,155
[ Back to top ]