
株式会社デンソーウェーブにより出願された特許
251 - 260 / 1,155
空調制御装置及び空調制御装置の人検知グループ管理方法
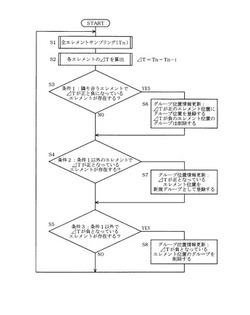
【課題】簡単な構成によって室内の人の有無を正確に検出することができる空調制御装置を提供する。
【解決手段】制御部は、室内の空間を列状に分割した各領域;エレメントE1〜E8の温度を検出するように配置されている複数の赤外線センサにより検出される温度データを所定の測定周期ごとに参照し(S1)、各赤外線センサについて前回測定された温度データTn-1と今回測定された温度データTnとの差ΔTを求め、その差ΔTの絶対値が所定値以上となったものを有意温度差データとして検出する(S2)。そして、有意温度差データの符号が正である赤外線センサの位置に人検知グループを登録し(S7)、有意温度差データの符号が負である赤外線センサについては、当該赤外線センサの位置に登録されている人検知グループを削除する(S8)。
(もっと読む)
携帯端末

【課題】静電気に対する耐性を簡易な構成で向上させ得る携帯端末を提供する。
【解決手段】光学的情報読取装置では、充電装置の給電端子に接触することで充電が開始される受電端子26,27が筐体21外に露出している。この光学的情報読取装置では、回路基板30が収容される筐体21の一部を覆って保護する導電性の緩衝部材28,29が設けられており、これら緩衝部材28,29は、回路基板30のグランドパターン31,32に常時接続されている。
(もっと読む)
ロボットシステム
【課題】ロボットの運転に際し、制御ユニット側からロボット側のエンコーダに対して適正な駆動電源を供給し、ひいてはエンコーダの検出性能を確保する。
【解決手段】ロボット10は、複数のモータ21〜26と複数のエンコーダ21a〜26aとを備えている。ロボット10と制御ユニット30とは電気ケーブル40を介して接続されており、それにはエンコーダ駆動電源を供給する電源ケーブル42が含まれている。制御ユニット30は、コントローラ31と電源回路32とを備えており、コントローラ31は、電源回路32で生成される電源電圧を、エンコーダ駆動に適した適合電源電圧に調整する。このとき、コントローラ31は、電源電圧を複数の段階で変更しながら設定し、電源電圧が設定された状態で、各エンコーダ21a〜26aの通信状況の良否を判定する。そして、通信状況が良好であると判定された時の電源電圧に基づいて、適合電源電圧を算出する。
(もっと読む)
充電装置
【課題】充電端子において接触位置が集中することに起因する不具合を抑制し、より確実に充電することができる充電装置を提供する。
【解決手段】充電装置10は、外周部に充電端子21a,21bが設けられた充電電極本体20a,20bが携帯機器1を保持する機器保持部12を備えた筐体11に回動可能に取り付けられており、この充電電極本体20a,20bと連動して歯車23が回動するように構成されている。そして、携帯機器1の装着操作時又は離脱操作時に被押圧部31の変位に応じて作用部32が歯車23に作用したとき、規制部材40は歯車23が一方向に所定量回転することを許容し、充電端子21a,21bが歯車23と連動して回転することで、充電端子21a,21bにおける外部端子3a,3bの接触位置が変化するように構成されている。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】角度センサに異常が生じた場合において、サーボモータと減速機との接続部分への負担を抑制しつつ、ダイナミックブレーキと機械ブレーキとを用いて速やかにサーボモータを停止させる。
【解決手段】ロボット制御装置200は、角度センサ160の異常が検出された場合において、推定された回転速度においてダイナミックブレーキを作動させたと仮定した場合に該ダイナミックブレーキによって生じる制動トルクと、機械ブレーキ150を作動させたと仮定した場合に該機械ブレーキ150によって生じる制動トルクとのトルク合計値が、所定のトルク上限値を超える場合に、機械ブレーキを作動させずにダイナミックブレーキを作動させる第1の制動処理を実行し、トルク合計値が前記トルク上限値以下の場合には、ダイナミックブレーキおよび機械ブレーキを作動させる第2の制動処理を実行する。
(もっと読む)
ロボットシステム
【課題】ワークを搬送しつつ、各工程でワークに対して作業を行うロボットシステムにおいて、設備の取り外しや追加の手間を減らす。
【解決手段】ロボットシステム20Aは、ワークWをシステム20Fから受け取るとともに、ワークWをシステム20Bへ引き渡す載置台22Aを備える。システム20Aは、システム20Aの載置台22Aからシステム20Bの載置台22BへワークWを受け渡すロボット30Aと、載置台22AにおいてワークWに対して作業を行う作業装置21Aとを備える。システム20Aは、ロボット30Aに設けられたRFIDタグ33Aと、ロボット30FがワークWを載置台22Aへ受け渡す際に、RFIDタグ33Fの情報を無線で読み込むリーダライタヘッド25Aと、ロボット30AがワークWを載置台22Aから引き渡す際に、RFIDタグ33Aに情報を無線で書き込むリーダライタヘッド25Aと、を備える。
(もっと読む)
位置検出システム
【課題】無線タグリーダによって無線タグの位置を追跡し得る位置検出システムにおいて、無線タグの電力消費を効果的に抑制する。
【解決手段】位置検出システム1において、無線タグリーダ10は、可変指向性アンテナ14を備えると共に、無線タグ50に対して電波の走査速度に関するデータを含む送信データを送信可能とされており、更に、無線タグからの電波を取得したときの可変指向性アンテナに対する電波の最大入射方向に基づいて無線タグ50の方位を追跡可能とされている。無線タグ50は、送信データに含まれる「走査速度に関するデータ」に基づいて、当該無線タグ50における周期的な電波送出時間帯を決定しており、その決定された電波送出時間帯に従い、アンテナ54を介して電波を周期的に送信している。
(もっと読む)
6軸ロボットの4軸原点位置較正方法、6軸ロボットの制御装置、7軸ロボットの5軸原点位置較正方法及び7軸ロボットの制御装置
【課題】大型の検出器具を設置したりする必要がなく、6軸ロボットについて4軸の原点位置を適切に較正できる6軸ロボットの4軸原点位置較正方法を提供する。
【解決手段】垂直多関節型の6軸ロボットについて、6軸の軸心の延長線上に計測点を定めるための計測補助具を取り付け、5軸を4軸の軸心の延長線から所定の角度θ5_1だけ回転させて計測点を第1計測位置に移動させ(S1)、第1計測位置をレーザー変位計により計測すると(S2)、5軸を、4軸の軸心の延長線から上記の回転方向とは逆方向に角度θだけ回転させる(S3)。次に、少なくとも6軸を固定して、計測点を、第1計測位置と同じ位置となる第2計測位置に移動させ(S4)、第2計測位置をレーザー変位計により計測すると(S5)4軸の誤差角度Δθ4を(4)式で求め(S6)、誤差角度Δθ4を用いて4軸の原点位置を較正する(S7)。
(もっと読む)
暗号鍵提供システムおよび暗号鍵提供方法
【課題】暗号鍵の提供に関するセキュリティ性を向上させ得る暗号鍵提供システムおよび暗号鍵提供方法を提供する。
【解決手段】暗号生成装置20は、暗号鍵を順次生成し、生成された暗号鍵を前暗号鍵K2に基づいて暗号化した提供用QRコードQoを生成して暗号解読装置30に提供するとともに、配信用情報を生成された暗号鍵に基づいて暗号化した配信用QRコードQdを生成して配信する。暗号解読装置30は、暗号生成装置20から提供された提供用QRコードQoをコードリーダ31により読み取ると、提供用QRコードQoを前暗号鍵K2に基づいて解読することで、現暗号鍵K1を取得し、この現暗号鍵K1を半導体メモリ34に記憶する。そして、暗号解読装置30は、配信用QRコードQdをコードリーダ31により読み取ると、配信用QRコードQdを現暗号鍵K1に基づいて解読することで、配信用情報を取得する。
(もっと読む)
全館空調システム
【課題】人が空調されている部屋から退出しても残存者が不快感を覚えることがないようにする。
【解決手段】全館空調システム1は一つの空調ユニット3で複数の部屋A〜Dを空調する。部屋Aには分割エリア用人検知センサ13−1〜13−5及びドアエリア用人検知センサ14が設けられている。上記各人検知センサを利用した移動判断手段により人のドア方向への移動が有ると判断され、上記各人検知センサを利用した残存者有無判断手段により移動者以外に人が残存していると判断されたときには、その時点で、通常空調運転に代えて退出対応空調強化運転を開始する。上記各人検知センサを利用した退出判断手段により人の退出が判断され且つドア開閉予測時間が満了したとき、又は人の退出が判断されないまま退出対応空調強化運転開始から所定時間が経過したとき、通常空調運転に戻す。
(もっと読む)
251 - 260 / 1,155
[ Back to top ]