
株式会社デンソーウェーブにより出願された特許
981 - 990 / 1,155
光学情報付き容器、光学情報付き包装材、光学情報の読取方法
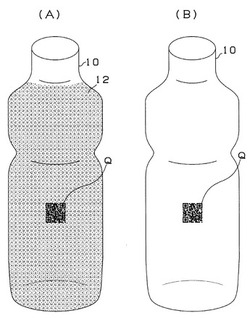
【課題】 読み取り不可能な状態から読み取り可能に変えることができる光学情報の付加された容器を提供する。
【解決手段】 黒色のQRコードQは、図2(A)に示すペットボトル容器10内にコーヒー飲料水12が充填された状態では、背景色(コーヒー飲料水)とのコントラスト差が無いため、情報コード読取装置20で読み取ることができない。しかし、図2(B)に示すように容器10が空の状態になれば、背後に白色板(反射体)14を置くことで、黒色のQRコードQは背景色(白色の板)とのコントラスト差が大きくなり、情報コード読取装置20で読み取ることができる。
(もっと読む)
光学情報読取装置

【課題】 エリアマーカの明示範囲内にある光学情報コードを確実に読み取ることができる光学情報読取装置を提供する。
【解決手段】 受光センサ23からエリアマーカ投射器25が水平方向へずらされ配置されることで、受光センサ23の撮像範囲Eからエリアマーカ投射器25のエリアマーカMfが水平方向へずれる。位置ズレに対して、受光センサ23を水平方向へ移動させることで、撮像範囲EとエリアマーカMfとを一致させる。これにより、エリアマーカMfの明示範囲内にある情報コードQが、受光センサ23の撮像範囲Eから外れることが無くなるので、エリアマーカMfの明示範囲内にある情報コードQを確実に読み取ることができる。
(もっと読む)
RFIDタグ取付方法及びRFIDタグ取付具
【課題】簡単な作業で、商品やRFIDタグ取付具が破損することなく、RFIDタグを商品に適切に取付ける。
【解決手段】仮止め用板バネ3と固定用バネ4とを有するRFIDタグ取付具1を用いて、殻21の縁を本体部材2の商品挿入部10に挿入して仮止め用板バネ3により両面側から挟み込むことでRFIDタグ取付具1を殻21の縁に仮止めし、次いで、仮止め用板バネ3の挙動を固定用バネ4により規制してRFIDタグ取付具1を殻21の縁に固定し、RFIDタグ7をアワビに取付ける。
(もっと読む)
携帯機器用充電装置
【課題】 収容部に収容した携帯機器を確実に充電できる携帯機器用充電装置を提供する。
【解決手段】 傾いた状態で収容部60に差し込まれた携帯機器10が、収容部60の対向壁64と当接壁62とに当接し、携帯機器10の受電端子34が携帯機器用充電装置50の充電電源端子80から離れていたとしても、対向壁64のローラ74と当接壁62のローラ72とにより、傾いた携帯機器10が収容部60の底部69に当接する位置まで自重で下がり、携帯機器10の受電端子34に携帯機器用充電装置50の充電電源端子80が接し、携帯機器10を充電することができるようになる。
(もっと読む)
通信装置及び搬送波検出方法
【課題】より簡単な構成で、相手による搬送波出力の有無を判定できる通信装置を提供する。
【解決手段】通信装置1,7が搬送波をASK変調した無線信号を用いて通信を行う場合、CPU3は、相手側より送信される搬送波の出力が開始される場合、並びに出力が停止される場合に、復調回路8により復調された後、受信データ波形を成形する2値化回路9より2値化されて出力される搬送波断続パルスに基づいて、相手側の搬送波の出力状態を検出する。
(もっと読む)
光学的情報読取装置の読取光軸調整システム及び光学的情報読取装置
【課題】読取機構の読取光軸の位置の調整の作業を容易且つ確実に行う。
【解決手段】光学情報読取装置2の読取機構7の構成部品の一部(ミラー)を、その読取光軸Oが垂直(上下)方向に変位するように本体6(読取口)に対して移動可能に設ける。調整動作の実行時において、ミラーは、駆動モータ4により自動で移動される。テスト用コードが記されたテスト用プレート5を、光学的情報読取装置2に対して所定位置に配置する。外部装置3(CPU)は、駆動モータ4を制御して、読取機構7の読取光軸Oを自動で変位させながら、光学的情報読取装置2から送信される入力データ(受光センサの受光信号)を監視し、テスト用コードのデータに一致するかどうかを判定し、一致した時点で駆動モータ4を停止させることにより、読取光軸Oの位置合せを自動で行う。
(もっと読む)
ロボットの干渉回避方法およびロボット
【課題】複数のロボットの干渉(衝突)を回避する。
【解決手段】2台のロボット1,2は、作業領域が互いに重なり合う領域を共有領域Bとして記憶している。また、2台のロボット1,2は互いに通信して互いの現在位置、その現在位置で制動をかけたとしたときの停止位置の情報を交換している。各ロボット1,2は、現在位置で制動を掛けたときの停止位置が共有領域内に進入すると判断したとき、相手のロボットが共有領域に位置し、または制動をかけたとしたときの停止位置が共有領域になると判断した場合、自身に制動をかけて停止し、共有領域内に進入する状態となることを回避する。
(もっと読む)
アンテナ装置
【課題】2つの周波数の電波に対応可能な構成でありながら、全体の構成を小形化する。
【解決手段】本発明のアンテナ装置1は、ケース2と、第1の周波数用のコイルアンテナ3と、パッチアンテナ素子4及びグランドプレーン5から構成された第2の周波数用のパッチアンテナ6とを備えたものにおいて、ケース2内で、上部にコイルアンテナ3を配設し、中間部にパッチアンテナ素子4を配設し、下部にグランドプレーン5を配設して3層構造をなすように構成したものである。
(もっと読む)
光学情報読取装置
【課題】消費電流をより一層低減する。
【解決手段】本発明の光学情報読取装置1は、情報コードを光学的に読み取って文字や記号等の情報に変換するものにおいて、読み取り時に消費する電力を可変できる電気回路構成を備え、読み取り速度等の読み取り性能を最大に上げる第1の読取モードを備え、そして、受光センサ4の駆動クロックを低下させて消費電流を少なくした読取モードであって、読み取り速度等の読み取り性能が前記第1の読取モードよりも劣る第2の読取モードを備えたところに特徴を有する。
(もっと読む)
ロボットの干渉回避方法およびロボット
【課題】同時に動作する複数のロボットにおいて、それらのロボットが干渉を回避するために待機する場合、できるだけ目標位置近くで待機して干渉の恐れがなくなったときに短時間で目標位置に到着する。
【解決手段】第1,2のロボット1,2が目標位置に向って移動する場合、その目標位置での占有領域M1,M2を設定する。占有領域M1,M2が重なる干渉領域Vで一方のロボットが作業をしている間、他方のロボットは、干渉領域Vの直ぐ近くで待機する。このため、一方のロボットが干渉領域Vでの作業を終えた後、他方のロボットは、目標位置に移動する動作を再開するが、自身の占有領域内からの動作再開であるから、短時間で目標位置に到達する。
(もっと読む)
981 - 990 / 1,155
[ Back to top ]