
テカン・トレーディング・アクチェンゲゼルシャフトにより出願された特許
1 - 10 / 26
液滴サンプルを操作するためのカートリッジ及びシステム
【課題】電極アレイを用いて液滴サンプルを操作するための作業フィルムを有するカートリッジ、および、カートリッジが配置される液滴操作システムを提案する。
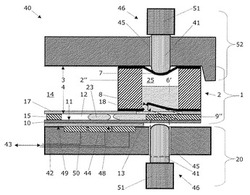
【解決手段】カートリッジ1は、試薬又はサンプ6’を内部に保持するように構成される多数のウェルを有する本体部2、ウェルの上側をシールするように構成される柔軟に変形可能な上部構造7、ウェルの底側をシールするように構成される穿孔可能な底部構造8、本体部の下面4の下方に位置し疎水性上面11を有する作業フィルム10、作業フィルムを本体部に接続する周辺スペーサ9、周辺スペーサによって規定される隙間12、及び、底部構造を穿孔するように構成される多数の穿孔要素13を有する。システム40は、カートリッジを上に配置することができる電極アレイ20を有する。
(もっと読む)
マイクロキュベットアセンブリ及びその利用方法

【課題】本発明は、周知の欠点を除去する、若しくは最小化するマイクロキュベットに関する。
【解決手段】生体サンプルを調べるためのマイクロキュベットアセンブリであって、一つ又はそれ以上の第1のキュベット表面を含む第1の部分プレートと、第1の部分プレートに対向して配置され一つ又は複数の第2のキュベット表面を含む第2の部分プレートを含む。マイクロキュベットアセンブリは、マイクロキュベットアセンブリの動作位置のマイクロキュベットの第1と第2のキュベット表面は、このマイクロキュベットのこれら2つのキュベット表面の間で保持されるように第1と第2のキュベット表面の一つに予め加えられた液体体積により湿潤することを特徴とする。
(もっと読む)
充填レベル検出のための容量測定方法及び装置、並びにそれに応じて装備された実験機器
【課題】充填レベルを決定するための、又は媒体の量、例えば複数の密接に隣接した容器内の液体の量を検出するための装置及び方法を提供する。
【解決手段】同一寸法の規則的に配置された容器からなる群(10)の個別容器(5.1、5.2)内の充填レベルの容量決定のための装置(100)であって、送信電極(201.1)及び受信電極(201.2、201.3)並びに容量測定を実行するための送信回路(57)及び受信回路(58)を回路を有する。ベースプレート(200)によって規定される水平面に対して一方向に突出し、同一寸法の複数の作業地帯が形成されるように相互に均一に間隔をあけて離れて配置される複数の電極(201.1、201.2、201.3)を備えている。接続部202をそれぞれ用いてこれらの2つの電極の一方(201.1)が送信器として使用され、2つの電極の他方(201.2、201.3)が受信器として使用される。
(もっと読む)
レーザスキャナ装置用スライド移送機構
【課題】蛍光サンプルのレーザスキャナ装置において、代替のスライド移送機構を提案する。
【解決手段】レーザスキャナ装置は、サンプルスライドを保持し、モータ駆動可能なサンプルテーブル(2)と、少なくとも1つのレーザビームを供給するための第1光学系と、レーザビームをサンプルに向けて偏向するためのスキャナ装置とを備え、スキャナヘッドは、走査軸または座標系のX軸に往復運動可能なように構成される。レーザスキャナ装置(1)は、サンプルから到来する放射ビーム束を検出するための検出器に伝達するための第2光学系とを備える。レーザスキャナ装置(1)用のスライド移送機構は、サンプルスライドを、レーザスキャナ装置(1)の保管ユニット(4)からサンプルテーブル(2)へ行き来させるように構成されたモータ付搬送装置(3)を備える。
(もっと読む)
圧力センサを備える容積型ポンプ
【課題】ピペット装置または送出装置において使用するための圧力センサ付き容積型ポンプ装置であって、従来技術から知られている欠点を少なくとも部分的に取り除く。
【解決手段】シリンダ壁(4)が、シリンダ壁(4)の内側に位置し、シリンダ底部(5)までポンプシリンダ(2)の実質的に全長にわたって延びているピストンスリーブ(14)を備えている。さらに、圧力チャネル(12)の主たる部分(13)が、ピストンスリーブ(14)を備えるシリンダ壁(4)に位置することで、ピストンスリーブ(14)が、ポンプピストン(7)が圧力センサ(10)の位置を過ぎて移動するときに圧力センサ(10)またはシリンダ壁(4)の内表面(30)に触れる、あるいは圧力センサ(10)またはシリンダ壁(4)の内表面(30)を危険にさらすことを防止することを特徴とする。
(もっと読む)
相界面を検出する方法および装置、並びにこれらを備えた実験用機器
本発明は、液体タンク(5.1〜5.8)内の相界面を検出する機器(100)に関する。この機器(100)は、液体タンク(5.1〜5.8)内の相界面の方向へ前進できるセンサ(3.1〜3.8)を備える。静電容量(dc/dt)の変化を検出するために、センサ(3.1〜3.8)の出力信号(s(t))を処理する回路(13)が設けられている。回路(13)は、短いパルス幅の第1信号(s1(t))、s1d)を出力信号(s(t))からろ過除去するための第1フィルタモジュールを設けた第1チャネルと、より大きなパルス幅の第2信号(s2(t)、s2d)を出力信号(s(t))からろ過除去するための第2フィルタモジュールを有する第2チャネル(40)とを備えている。コンパレータモジュール(11)を有するコントローラモジュール(8)をさらに使用しており、このコントローラモジュールは第1信号(s1(t)、s1d)が第1閾値に達しているかどうかを決定する。第2信号(s2(t)、s2d)が所定の第2信号基準を満たしているかどうかを決定する処理モジュール(12)をさらに設けている。 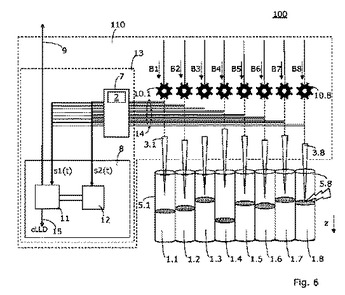 (もっと読む)
(もっと読む)
蛍光測定用レーザスキャナ装置
【課題】試料スライド上に配置され、2つの異なる蛍光色素を用いて処理した蛍光サンプルを画像化するための代替のレーザスキャナ装置を提案する。
【解決手段】レーザスキャナ装置1は、サンプルテーブル2と、異なる波長のレーザビーム54,55を供給するレーザ51,52および第1光学系53と、レーザビームを偏向する光学偏向素子56と、レーザビームをサンプルに集光する第1対物レンズ57と、サンプルからの発光ビーム束59,60を検出器61,61’へ伝送する第2光学系58と、発光ビーム束を検出する2つの検出器とを備える。光学偏向素子は、介在角度(β)で配置された前側および後側のダイクロイック面63,64を持つウェッジ形状のダイクロイックミラー62を備える。該ミラーは、2つのレーザビームが一方の表面63,64でそれぞれ反射するように調整され、2つの焦光ポイント65および2つの発光ビーム束の空間分離を生じさせる。
(もっと読む)
自己補償容量性液体レベル検出器
【課題】信頼性の高いアウトプット信号を与えることのできる液体レベル検出方法を提供する。
【解決手段】容量性液体レベル検出器(14)が液体レベルを検出方法及び装置において、容量性液体レベル検出器(14)の所定の感度に対応する所定のオンタイム(t1)を伴うクロック信号を生成する工程と、基準生成器(12)と容量性液体レベル検出器(14)の両方に供給される工程と、基準生成器(12)がクロック信号のオン/オフ比から導出する制御値を生成し比較器(18)の制御インプット(19)に供給する工程と、クロック信号に応答して容量性液体レベル検出器(14)の液体検出応答信号を比較器(18)の信号インプット(20)に供給する工程と、液体検出応答信号が容量性液体レベル検出器(14)のインプット容量(C)の変化に応答して閾値を超えると、比較器(18)がアウトプット(21)にてアウトプット信号を誘発する工程とを含む。
(もっと読む)
質量分析における機能点検および変動補償
本発明は、質量分析計(5)の機能を点検する方法、および質量分析でのイオン収量の変動を補償する方法に関し、クロマトグラフ分離システム(1,2)の溶出液を質量分析計(5)に供給するステップと、別個のターゲット検体溶液を、既知の濃度で一定の流量で、溶出液と連続的に混合させるステップと、この混合物を質量分析計(5)に投入し、混合物についての検出器信号を発生するステップと、ターゲット検体の統合ライン(6)および質量スペクトルグラフのピーク(7)を含む質量スペクトルグラフを取得するステップ(統合ラインは、溶出液の質量スペクトル分析にとって基礎となる、持続するバックグランド信号)と、ターゲット検体の統合ライン(6)の上方にある、統合した質量スペクトルグラフのピーク領域(A)および、ピーク統合ライン(6)から垂直な下降ラインによって、ターゲット検体の統合ピーク領域(A)の下方に見つかる領域(B)を取得することによって、質量スペクトルグラフを評価するステップと、決定した質量スペクトルグラフ領域(A)(B)から、数学的関係を形成するステップとを含む。 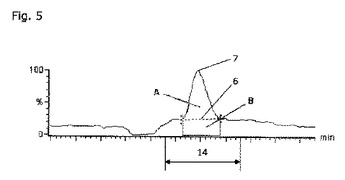 (もっと読む)
(もっと読む)
コンピュータ制御の液体処理ワークステーションにおける直接分注
インタフェース(1)に関するとともに、作業面(3)、少なくとも一つのピペット(6)を有する電動式分注ロボット(5)、及び、分注ロボット(5)が接続される制御コンピュータ(10)を有するコンピュータ制御の液体処理ワークステーション(2)の遠隔制御のためのインタフェースの使用に関する。制御コンピュータ(10)において作動する制御プログラム(11)は、分注ロボット(5)に対して、作業面(3)の特定位置(12、12’、12”)に少なくとも一つのピペット(6)を位置決め可能とし、その少なくとも一つのピペット(6)を用いてそこで特定の動作(13)を実行可能とする。インタフェース(1)は、入力手段(16)、可視化手段(17)、インタフェース・ソフトウェア(18)、及び電子メモリ(19)を備える。可視化手段(17)は、液体処理ワークステーション(2)の作業面(3)で容器(4)が置かれた位置(12)、及びピペット(6)を用いて実行可能な特定動作(13)の選択を可視化することを実行する。本発明によれば、インタフェース(1)及びインタフェース・ソフトウェア(18)は、入力手段(16)あるいはインタフェース(1)によって任意に選択された少なくとも一つのピペット(6)を、及び特定の容器(4)に少なくとも一つの指定された分注位置(12、12’、12”)を、アイコン(35)として可視化することを実行し、またさらに、特定位置(12、12’、12”)を指定した直後で、選択された特定動作(13)を実行する前に、特定の容器(4)の指定された分注位置(12、12’、12”)に選択されたピペット(6)を位置決めするように、コンピュータ制御の液体処理ワークステーション(2)の分注ロボット(5)を誘導することを実行する。あるいは、インタフェース(1)及びインタフェース・ソフトウェア(18)は、2次元又は3次元シミュレーションで、コンピュータ制御の液体処理ワークステーション(2)の分注ロボット(5)を可視化するために、及び、特定位置(12、12’、12”)を指定した直後で、選択された特定動作(13)を実行する前に、特定の容器(4)の指定された分注位置(12、12’、12”)に選択されたピペット(6)を実質的に位置決めするために実施されあるいは使用される。 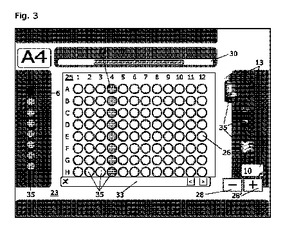 (もっと読む)
(もっと読む)
1 - 10 / 26
[ Back to top ]