
ジャパンマリンユナイテッド株式会社により出願された特許
81 - 90 / 172
磁気信号検出方法、磁気信号検出プログラム、磁気信号検出装置
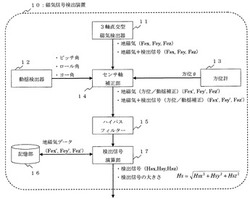
【課題】定量的に正確な磁気変化量を検出することのできる磁気信号検出方法を提供する。
【解決手段】移動体から発生する磁気信号を検出する方法であって、移動体とともに移動して磁気信号を検出する磁気センサ11と、磁気センサ11の近傍に配置され磁気センサ11の動揺を検出する動揺検出器12と、を設け、磁気センサ11の検出値を取得するステップと、磁気センサ11の基準軸に対する動揺を動揺検出器12より取得する第1ステップと、動揺検出器12より取得した動揺の検出値に基づき磁気センサ11の検出値を補正する第2ステップと、を有する。
(もっと読む)
シーチェスト

【課題】高速航行中の推進性能への悪影響を及ぼすことなく、海水の取り込みが可能で、係留中のゴミの吸込を防止することができるシーチェストを提供する。
【解決手段】シーチェスト1は、船舶10の船底11に形成された開口部12に設置された複数本の格子部材20と、通水孔31を具備する複数枚の板部材30と、を有している。格子部材20の最下部22が、船底11の下面と略同一面に位置するように配置され、且つ、板部材30が、船底11の下面より上方に位置するように配置されているから、板部材20の下方に格子部材20に挟まれた凹部50が形成される。格子部材20は船幅方向に平行で、所定の幅の隙間が空いた格子を形成し、傾斜した船首側平面21と、船尾側の円弧面23と、船尾側平面24と、を具備しているから、凹部50に流入する海水の流れは乱れが少なく、船舶10の推進性能への悪影響は少ない。
(もっと読む)
衝撃緩衝装置の設計方法、衝撃緩衝装置の設計プログラム
【課題】船体から装備機器に伝わる衝撃の緩衝装置を最適に設計する方法、およびそのプログラムを提供する。
【解決手段】船舶に搭載する装備機器の衝撃緩衝装置を設計する方法であって、船舶の構造モデルを作成する船舶モデル作成ステップと、船舶モデル作成ステップで得た構造モデル上の所定位置について時刻歴応答解析を実行し、当該位置における衝撃スペクトルを作成する衝撃スペクトル作成ステップと、装備機器の構造モデルを作成する装備機器モデル作成ステップと、衝撃スペクトル作成ステップで得た衝撃スペクトルを、装備機器モデル作成ステップで得た構造モデルについて適用し、当該装備機器について衝撃スペクトル解析を行う衝撃スペクトル解析ステップと、を有し、衝撃スペクトル解析ステップの結果に基づき衝撃緩衝装置の耐衝撃性を設計する。
(もっと読む)
レーダー波反射面積低減装置
【課題】レーダー目標物のレーダー波反射面積を低減させることができるレーダー波反射面積低減装置を得る。
【解決手段】複数の平板状の反射面部を連成して波板状に形成され、入射されたレーダー波の全部又は一部を反射するカバー部材1を備え、カバー部材1により、レーダー目標物の全部又は一部を覆い、当該レーダー目標物のレーダー波反射面積を低減させる。
(もっと読む)
ケーブル収納機構
【課題】溶接ロボットに接続されている複数本のケーブルの出し入れが簡便に行え、コンパクトに収納すること。
【解決手段】フロア2に搭載された動力装置3及び制御装置4と、フロアから吊り下げられ、切り抜き溝を渦巻き状に切って形成したハンガーレール7を有するローラ滑車テーブル6と、フロア2の側部直下に設けられ、ハンガーレール7と連続してワークまで延びているI型レール8と、I型レールを自走する溶接ロボット30と、動力装置及び制御装置と溶接ロボットとを接続する複数本のケーブル15と、2段式のローラ滑車10と、ローラ滑車から保持部材用吊下体11を介して吊り下げられ、複数のケーブルを保持するケーブル保持部材12とからなり、ハンガーレール上を所定間隔を置いて配置された複数のケーブル走行用部材9と、ケーブル走行用部材同士を回動自在に連結する複数のロッド13とを備えている。
(もっと読む)
水上又は水中航走体の監視装置
【課題】複数の種類の船種等の監視を迅速に行うことを可能にした航走体監視装置を提供する。
【解決手段】航走する単一の航走体から発生する複数の種類のシグネチャをそれぞれ検出する複数のセンサからなるセンサ部2と、該センサ部2からの複数の検出信号を複数の船種等に応じてそれぞれ処理する機能を有する信号処理部5と、航走する航走体の判定情報が設定され、前記信号処理部で処理された波形信号に基いて航走する航走体の船種等を判定する総合判定部6とを備えたものである。
(もっと読む)
水上/水中航走体監視装置
【課題】機能評価を適切に行うことを可能にした航走体監視装置を提供する。
【解決手段】水中に配置され、航走体を監視する監視装置において、航走体が発するシグネチャを検出するためのセンサ部21と本監視装置の動作試験対象の航走体から少なくともその位置情報を含む航走諸元情報を受信する音響コマンド送受信部25と、前記送受信部25からの航走諸元情報に含まれた位置情報に基づいて、センサ部21の出力に基づいて監視データを生成する信号処理部22と、少なくとも船舶と監視装置本体との距離を求め、監視データと距離データとを記録部23に保存させる評価部26とを有する。
(もっと読む)
ロンジ突合継手自動溶接ロボット
【課題】小型、軽量で工具なしで組立と分解が容易に行え、ロンジへの取付けの段取作業、溶接作業、片付け作業までを1人で可能とすること。
【解決手段】ボトムロンジフェース104間に着脱自在な走行レール21と、走行レール上を自走する走行駆動体22とからなる走行ユニット2と、走行駆動体に着脱可能に立設され昇降軸支持体23と、昇降軸支持体に設けられた昇降用ネジ軸24に螺合して上下動する昇降駆動体25とからなる昇降ユニット3と、昇降駆動体にマニプレータ部固定クランプ26により取付られたマニプレータ支持体27と、マニプレータ支持体に取付られた前後軸部28と、前後軸部に前後方向に移動するよう取付られ、旋回、回転、捻りの回転3軸を有するマニプレータ29とからなるマニプレータユニット4と、マニプレータに着脱自在に取付られたトーチホルダ5に保持され溶接トーチ6とを備えている。
(もっと読む)
薄板鋼板の肌付治具
【課題】小型、軽量で、ワンタッチの操作で鋼板に対して押し付け状態を維持して肌付作業が行えるようにした薄板鋼板の肌付治具を得ること。
【解決手段】長さが調節可能な伸縮バー1と、伸縮バーの略中央部から垂下し、重ね継手の下側鋼板のコルゲーションクロス部51を把持固定する支点クランプ3を下端に有する支点ロッド2と、伸縮バーの一端部に上下方向に可動可能に取り付けられたロッド本体34と、伸縮バーの一端部に取り付けられ、操作レバー37の操作によりロッド本体34を上下方向に可動させることができる型押しトグル機構6と、ロッド本体の下端に着脱自在に取り付けられ、重ね継手におけるコルゲーションに対応した形状の肌付け型5とを有してなる型押しロッド4と、伸縮バーの他端部から垂下し、重ね継手の下側鋼板に下部が押し付けられる反力スタンド7とを備えてなるものである。
(もっと読む)
移動体位置等推定検出方法、装置及び移動体位置等推定検出方法のプログラム
【課題】繰り返し演算を行うことなく、磁界を利用して最接近位置を推定することができ、また、移動体による磁界が低減されている場合であっても、最接近位置を推定することができる移動体位置等推定検出方法、装置及び移動体位置等推定検出方法のプログラムを得る。
【解決手段】磁界検知器11により、海面又は海中を航行する航走体2により生じる磁界を3軸方向の各成分で検知する磁界検知ステップと、少なくとも航走体2の移動方位の情報に基づき、検知磁界Bのうち、航走体2の移動方位と直交し、且つ、海面と水平な横距離方向成分を求め、検知磁界Bの大きさに対する横距離方向成分の割合(By’/Bt’)を求める磁界補正処理ステップと、横距離方向成分の割合(By’/Bt’)に基づいて、航走体2と磁界検知器11との最接近位置を推定する横位置算出演算ステップとを有する。
(もっと読む)
81 - 90 / 172
[ Back to top ]