
株式会社デンソーアイティーラボラトリにより出願された特許
1 - 10 / 332
車両用運転支援装置
Notice: Undefined index: from_cache in /mnt/www/gzt_applicant_list.php on line 189
操作者識別装置及び方法並びに車載用ナビゲーション装置
Notice: Undefined index: from_cache in /mnt/www/gzt_applicant_list.php on line 189
住所検索表示装置
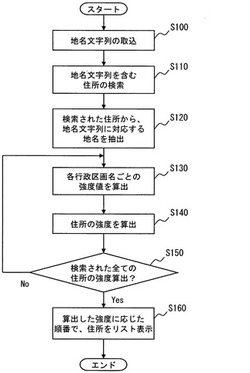
【課題】住所の一部をなす、ある地名を表す地名文字列が入力されたとき、ユーザが選択する可能性が高い順に、地名文字列を含む住所をリスト表示すること。
【解決手段】 ユーザが入力した地名文字列を含む住所を、住所データベースより検索し、検索された候補住所を、行政区画単位で分割するとともに、分割した行政区画名と地名文字列が表す地名とを検索ワードとしてインターネット上で検索を行った場合にヒットする件数に基づいて、地名文字列が指し示す住所である確からしさを表す、当該住所の強度を算出する。そして、算出された強度に基づき、地名文字列が指し示す住所である確からしさが高い順に、検索された候補住所をリスト表示する。
(もっと読む)
車載装置の制御システム

【課題】車両が置かれた状況において、より適切な車載装置によるサービスの提案を行なうことが可能な車載装置の制御システムを提供すること。
【解決手段】車両が置かれた状況を検出して、制御の対象となる車載装置を推定するとともに、乗員の言動を検出して、制御すべき車載装置及びその制御内容を決定する。車両の乗員の言動を検出することにより、車両に搭載されたセンサなどでは取得できない情報や、制御を実行すべき条件を完全には満たしていなくとも、その制御が必要な状況が生じていることを、乗員の言動から検知することができる。そして、この乗員の言動に基づいて、制御すべき車載装置及びその制御内容を決定することで、車両が置かれた状況において、より適切な車載装置によるサービスを車両の乗員に対して提案することが可能となる。
(もっと読む)
走行軌跡記憶装置
【課題】車両の絶対軌跡をより正確に生成する。
【解決手段】カーナビゲーション装置10は、修正測位軌跡生成処理部26によって、測位軌跡生成処理部22が生成した測位軌跡を修正した修正測位軌跡を生成し、修正推測航法軌跡生成処理部27によって、推測航法軌跡生成処理部25が生成した推測航法軌跡を修正した修正推測航法軌跡を生成し、絶対軌跡生成処理部28によって、修正測位軌跡生成処理部26が生成した修正測位軌跡と修正推測航法軌跡生成処理部27が生成した修正推測航法軌跡とを合成した絶対軌跡を生成し、この絶対軌跡を記憶する。
(もっと読む)
情報提供支援方法及び情報提供支援装置
【課題】嗜好情報の設定などの面倒な前準備操作を行うことなく、ユーザの嗜好に合った情報提供を使用開始時から受けられるようになる。
【解決手段】使用開始時には、ドライバプロフィール情報格納部101に格納されているドライバのプロフィール情報と、一般的傾向データベース102に格納されている平均的な嗜好性とに基づいて、そのドライバの年代や性別などに対応した平均的な嗜好性がベイジアンネットワーク処理部104に導入されて学習動作が行われる。また、コンテンツデータ格納部106に格納されている楽曲コンテンツから得られる楽曲がユーザの好みの楽曲として学習される。その結果、ベイジアンネットワークによる推論計算によってユーザの嗜好を反映した番組表が作成され、番組表に従った番組コンテンツの提供が行われる。また以降は、ユーザが番組聴取時に行う操作が学習され、ユーザの嗜好をより反映した番組提供が行われるようになる。
(もっと読む)
地図作成装置、方法及び車載用ナビゲーション装置
【課題】 走行により得られる位置情報に基づいて正確な地図情報を生成する。
【解決手段】 地図生成装置は、走行経路上のサンプリング点における位置情報を検出する位置検出部と、当該サンプリング点における曲率を算出する曲率算出部と、走行経路が、直線区間、円弧区間及びクロソイド曲線区間のいずれかで近似されるように、走行経路における曲率を補正する曲率補正部と、補正後の曲率に基づき走行経路に対応する道路上のノードの位置を示すノード情報を生成するノード情報生成部と、ノード情報を記憶する記憶部とを備える。曲率補正部は、走行経路における曲率変化量のピーク値Δχpeakを抽出するとともに、このピーク値をとる点を含む一定領域に対し、曲率変化量をΔχpeakとするクロソイド曲線区間として設定する。
(もっと読む)
目的地推定装置及びそれを含むナビゲーションシステム、目的地推定方法、及び目的地推定プログラム
【課題】 過去に目的地とされた場所を目的地候補として、それらの目的地候補の中から目的地を推定する目的地推定装置において、目的地の推定精度を向上させる。
【解決部】 目的地推定装置100は、過去に目的地とされた場所の履歴を記憶する学習データ記憶部9bと、学習データ記憶部9bに記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定部83と、目的地推定部83にて目的地として推定される目的地候補から、学習データ記憶部9bに記憶された履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除部84とを備えている。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラム
【課題】履歴として記憶された経路エレメントがユーザによく知られている経路エレメントであるか否かの判断の精度を向上させる。
【解決手段】ナビゲーション装置は、過去に通行した経路エレメントの履歴を記憶する通行履歴記憶部9aと、通行履歴記憶部9aに記憶された履歴に基づいて、通行履歴記憶部9aに記憶された経路エレメントについて、それをユーザが記憶している可能性の低さを示す記憶コストを決定する記憶コスト決定部84と、記憶コスト決定部84にて決定された記憶コストを含む経路全体の経路コストが最小になるように、経路エレメントを組み合わせることにより、目的地までの経路を探索する経路探索部85と、経路探索部85にて探索された経路に従って、経路案内をするナビゲーション部86とを備えている。
(もっと読む)
移動物体検出装置
【課題】複数の移動体を単一の移動物体であると誤認識してしまう状況の発生を抑制
【解決手段】移動物体検出装置1は、レーダ波を前方に向けて送信し、送信したレーダ波の反射波を観測した結果に基づいて、レーダ波を反射した反射点の位置である反射点位置を連続して検出する。検出された2つの反射点位置のうち、移動物体検出装置1から遠い方の反射点位置である第1反射点位置を移動物体における前端部の位置であるとし、移動物体検出装置1から近い方の反射点位置である第2反射点位置を移動物体における後端部の位置であるとして、第1反射点位置と第2反射点位置との間の距離である反射点間距離の時間経過による変動量が、反射点間距離の変動量が小さいことを示す予め設定された変動判定条件を満たす場合に、第1反射点位置および第2反射点位置がそれぞれ移動物体の前端部および後端部の位置であると判断する。
(もっと読む)
1 - 10 / 332
[ Back to top ]