
富士アイティ株式会社により出願された特許
1 - 5 / 5
クレーンの振れ止め制御装置
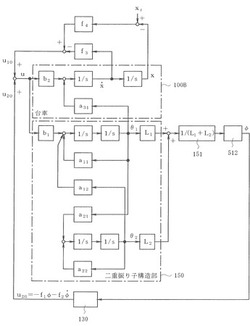
【課題】二重振り子構造、単振り子構造を含むクレーン搬送システムにおいて、速度パターンを持たずに、吊り荷の振れ止めを高精度に実現可能としたクレーンの振れ止め制御装置を提供する。
【解決手段】吊り荷及びその支持構造が単振り子構造または多重振り子構造を構成し、クレーン本体の台車を駆動して吊り荷を目標位置まで搬送するクレーン搬送システムにおいて、吊り荷503の振動による振れ角度を検出する振れ角センサ512と、吊り荷の速度検出値及び位置検出値をフィードバックして吊り荷を目標位置まで搬送するための第1の操作量を演算し、かつ、前記振れ角度を無線通信によりフィードバックして吊り荷の振れ止めを行うための第2の操作量を演算する演算制御手段としてのアシスト制御部101と、第1の操作量及び第2の操作量を加算して前記台車に与える手段と、を備える。
(もっと読む)
旋回クレーンの振れ止め制御方法及び制御装置

【課題】旋回角度θに起因する特異点を持たずに、旋回クレーンの連続的な振れ止め制御を可能にした旋回クレーンの振れ止め制御方法及び制御装置を提供する。
【解決手段】吊り荷運搬用のブームの旋回に関する運動方程式に基づく制御則に従って旋回クレーンを駆動するための制御入力を演算する制御方法において、前記制御入力を、ブームの目標旋回角速度と、ブームの目標旋回角度と、ブームの水平旋回半径と、旋回クレーンからフィードバックされたブームの実際の旋回角度,吊り荷の水平面内のx方向位置及びy方向位置,吊り荷のx方向速度及びy方向速度と、フィードバックゲイン及び定数とを用いて、改良バックステッピング法により演算する。
(もっと読む)
クレーンの振れ止め制御方法及び制御装置
【課題】多重振り子構造のクレーン搬送システムにおいて、台車の速度パターンを適切に決定して吊り荷の振れ止めを高精度に実現可能とする。
【解決手段】クレーン本体100による吊り荷503の支持構造が多重振り子構造を構成するクレーン搬送システムにおいて、多重振り子構造を振動させたときの吊り荷503の振れ角を検出する振れ角センサ512と、振れ角検出値から吊り荷503の振れ周期を演算する周期演算部1014Xと、吊り荷503を水平方向に搬送する際の加減速時間を前記振れ周期に等しくした複数の速度パターンの中から、吊り荷503の搬送距離に応じて一つの速度パターンを選択する速度パターン選択部1015Xと、選択した速度パターンを用いて吊り荷503を水平方向に搬送するためのインバータ制御部110X、インバータ111及びモータ112と、を備える。
(もっと読む)
懸架装置制御システム、その集中制御装置、懸架装置
【課題】懸架装置同士の連結状況を自動的に検出して登録できるようにする。
【解決手段】懸架装置のバトン部2に、RF−IDアンテナ11とタグ読取り装置12を備え、連結器具が接続された場合には、この連結器具に備えられるRF−IDタグからこの連結器具に与えられている固有の識別番号を読み取る。そして、読み取った識別番号や自己の管理番号等を、集中制御装置に送信して登録させる。
(もっと読む)
マスタ/スレーブ通信方式
【課題】スレーブ装置が多数となった場合でも、高速かつ同時性を確保した通信が可能なマスタ/スレーブ通信方式を提供すること。
【解決手段】マスタ装置は多数のスレーブ装置に対して同報通信により監視・制御命令を含む要求を送信し、各スレーブ装置はマスタ装置から指定された中継装置宛に応答を送信し、中継装置が各スレーブ装置からの応答を纏めてマスタ装置へ送信するように構成した。
(もっと読む)
1 - 5 / 5
[ Back to top ]