
ヴェーバー マシーネンバオ ゲーエムベーハー ブレイデンバッハにより出願された特許
1 - 7 / 7
切断ブレード
食品切断デバイスが、切断面を形成する主部分及び当該主部分に接続されている補強部を含む切断ブレードを含み、少なくとも1つの空洞が主部分と補強部との間に形成されている。 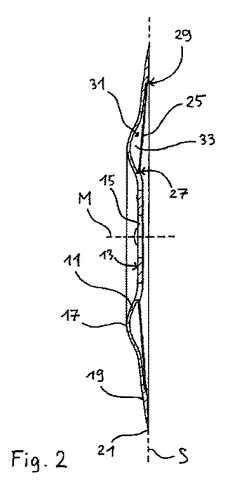 (もっと読む)
(もっと読む)
デルタ運動ロボット
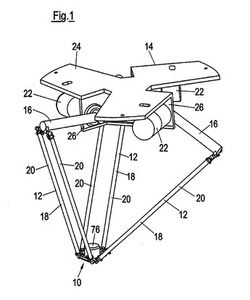
【課題】パラレルリンク式のロボットにおいて、ツール取付部に対して垂直軸回りの自由度を、小さな機械的作用で駆動可能とすること。
【解決手段】ツール取付部10を有するデルタ運動ロボットにおいて、前記ツール取付部10は、制御アーム12を介してロボット基部14に接続されているジョイントプレートと、前記ツール取付部10に取り付けられたツールを回転させる駆動部と、を有し、前記駆動部は前記ジョイントプレートに固定されていることを制御アーム12を介してロボット基部に接続されているジョイントプレートと、前記ツール取付部10によって取り付けられたツールを回転させる駆動部と、を有し、当該駆動部は当該ジョイントプレートに固定される構成とした。
(もっと読む)
脂肪層測定デバイス
本発明は、上等な部分及び脂肪層を含む肉製品(12)の脂肪層の厚さを測定する測定デバイス(18)に関し、当該デバイスにおいて、脂肪層の厚さは非接触態様にて測定される。本発明は、上述のタイプの測定デバイスを用いて、肉製品の上等な部分から肉製品の脂肪層を分離するデバイス、並びに、肉製品の脂肪層の厚さを測定する方法及び肉製品の脂肪層を分離する方法にも関する。 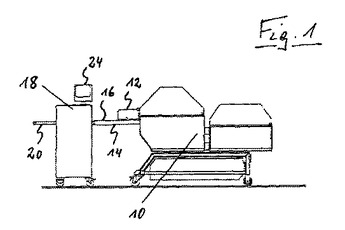 (もっと読む)
(もっと読む)
食品のスライス用装置
本発明は、選択されたスライス用プログラムに従って食品をスライスする、特に高性能スライシングデバイスであるデバイスに関する。該スライシングデバイスは、プロセスコントロール部と、前記選択されたスライス用プログラムに従って前記デバイス内にまたは前記デバイスに取り付けられるいくつかのコンポーネントとを含む。該コンポーネントはそれぞれ当該コンポーネントを一義的に識別するコードを有し、検出手段が該デバイス内にまたは該デバイスに取り付けられたコンポーネントのコードを検出する。該検出手段は、プロセスコントロール部に接続されており、該プロセスコントロール部は、該コンポーネントが選択されたスライス用プログラムに従って取り付けられたかどうかを検出されたコードから判断することができる。 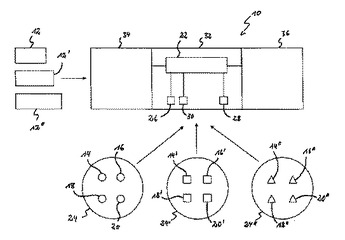 (もっと読む)
(もっと読む)
食製品のアラインメント
本発明は、食製品のアラインメント方法に関する。当該方法において、供給方向において搬入コンベヤに到達した食製品は、アラインメントステーションに達し、そこで製品がアラインメントされる。当該アラインメントされた製品は、当該アラインメントステーションから搬出コンベヤへ達する。アラインメントにおいて、目標とするアラインメントに対する製品のミスアラインメントが検出され、当該製品がそのミスアラインメントに基づいてアラインメントされる。当該製品は、製品支持部に支持されている製品によってアラインメントされ、当該製品支持部は、アラインメント動作を実行するように駆動され、当該製品のアラインメントは、当該製品と当該製品支持部との間の相対的な移動なしに達成される。本発明は、さらに食製品のアラインメントデバイスに関する。 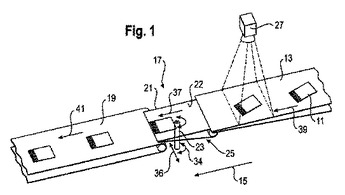 (もっと読む)
(もっと読む)
位置調整ユニット
本発明は、切断機の切断頭部の移動調整動作を行うように機能する位置調整ユニットに関し、特に食品をスライスするスライサの移動調整動作を行うように機能する位置調整ユニットに関する。頭部は位置調整ユニットに取り付けられることができる。位置調整ユニットはハウジングアッセンブリと当該ハウジングアッセンブリに設けられたアクチュエータとを有する。アクチュエータは、調整方向において動かない固定部と、調整方向において、固定部に対して調整可能な部分とを有し、調整動作を実行する。位置調整ユニットは、ハウジングアッセンブリに取り付けられ且つ調整方向に弾性変形可能な少なくとも1つの軸受をさらに有している。調整可能な部分は軸受と係合している。 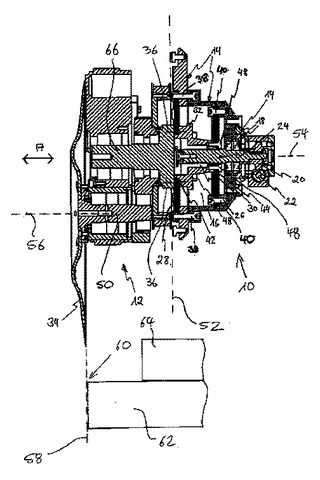 (もっと読む)
(もっと読む)
食品の薄切り用装置
食品を薄切りする装置が開示される。該装置は、食品と少なくとも1つの食品誘導面との間で少なくとも1つのエアクッションを形成する手段を含む。該手段は、薄切りにされるべき食品を支持する搬送ベルトの端部と切断面を仕切る切断エッジとの間に位置する食品供給エリアに配置される。 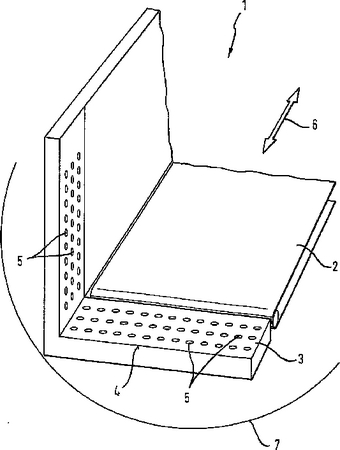 (もっと読む)
(もっと読む)
1 - 7 / 7
[ Back to top ]