
コンティ テミック マイクロエレクトロニック ゲゼルシャフト ミット ベシュレンクテル ハフツングにより出願された特許
1 - 10 / 79
周波数を求める回路装置
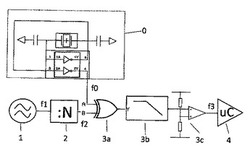
【課題】周波数を安価に高い精度で求める。
【解決手段】出力信号の周波数が分割され、低周波信号から既知の周波数を持つ低周波信号が減じられる。低周波の差信号に基いて出力周波数が求められる。
(もっと読む)
レーダアンテナ装置用導波管アンテナ
Notice: Undefined index: from_cache in /mnt/www/gzt_applicant_list.php on line 189
光学モジュール及び支持板を持つ装置
Notice: Undefined index: from_cache in /mnt/www/gzt_applicant_list.php on line 189
駆動電動機用電動機コンバータ回路及びこのような電動機コンバータ回路を持つ電気駆動装置
Notice: Undefined index: from_cache in /mnt/www/gzt_applicant_list.php on line 189
ハイドロプレーニングを自動的に防止する方法
本発明は、走行区間において自動車の走行作動中にハイドロプレーニングを自動的に防止する方法に関し、本発明によれば、
a)ハイドロプレーニングの危険に関して区間部分に関係する情報が自動車に準備され、
b)ぬれた車道を検出する少なくとも1つのセンサ装置が設けられ、
c)ハイドロプレーニングの危険を持つ走行区間の区間部分が存在し、かつぬれた車道が検出されると、ハイドロプレーニングを防止する援助機能が実施される。
(もっと読む)
制御装置にある監視計算機
本発明は、計算素子が構成されているプロセッサを監視する監視計算機(UR)を開示し、計算素子が実質的に3つのプログラムモジュールを含み、それにより自動車の走行挙動が影響を受ける。プロセッサが実質的に機能計算機(FR)及び機能計算機(FR)から物理的に独立した監視計算機(UR)を含み、監視計算機(UR)が再び2つの互いに独立したモニタリング装置(MU1,MU2)を含んでいる。 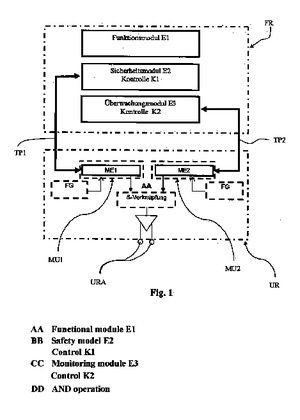 (もっと読む)
(もっと読む)
変速機制御装置として使用するため裸ダイ取付けにより重なり合って設けられる複数の印刷配線板層を持つ印刷配線板

本発明は、重なり合って設けられる複数の印刷配線板層を持つ印刷配線板(4)に関する。本発明によれば、印刷配線板層が、それぞれ170℃以上のガラス転移温度を持つ基材から形成され、印刷配線板層が電気絶縁基材上へ設けられる少なくとも1つの熱伝導層(19〜24)をそれぞれ持ち、印刷配線板層に対して直角にz方向に延びる複数のビア(16,17,18)が設けられ、これらのビア(16,17,18)が異なる印刷配線板層の熱伝導層(19〜24)を接続して、ビア(16,17,18)と印刷配線板層の熱伝導層(19〜24)が、一番上の印刷配線板層から一番下の印刷配線板層への熱伝導ブリッジを形成している。
本発明は更に車両に使用するための制御装置(1)及び制御装置(1)の使用に関する。
(もっと読む)
制御装置における監視構想
本発明は、自動車の制御装置にある計算素子を監視する監視構想を開示し、計算素子が実質的に3つのプログラムモジュールを含み、それにより自動車の走行挙動が影響を受ける。計算素子がプロセッサ上に構成され、プロセッサが実質的に機能計算機(FR)及び機能計算機(FR)から物理的に独立した監視計算機(UR)を含み、監視計算機(UR)が再び2つの互いに独立したモニタリング装置(MU1,MU2)を含んでいる。 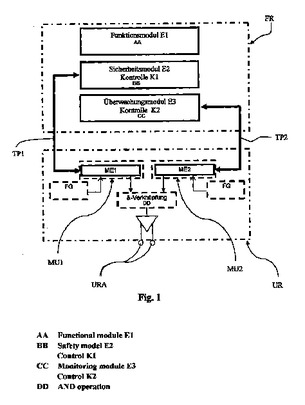 (もっと読む)
(もっと読む)
車両操縦の際道路通行車両の運転者を支援する方法
本発明は、車両操縦の際道路通行車両の運転者を支援する方法であって、車両周辺特に道路の車線を区画する標識及び交通標識が、周辺センサ装置(1)により検出され、画像評価システムにより評価されるものに関する。本発明によれば、周辺センサ装置(1)の画像データが、車線に関連する情報について評価され、識別された車線に関連する情報が、記憶装置(2a)に記憶されている国特有の車線標識を示すデータにより評価され、車両の現在の場所に相当する第1の国評価信号(S1)が発生され、かつ/又は交通標識に関連する情報について評価され、識別された交通標識に関連する情報が、記憶装置(3a)に記憶されている国特有の交通標識を示すデータにより評価され、車両の現在の場所に相当する国評価信号(S2)が発生され、かつ/又は自動車登録標識(4)の識別について評価され、頻度分析により国評価信号(S3)が発生される。1つ又は複数の国評価信号(S1,S2,S3)からマイクロプロセッサ(5)により、車両の現在の場所を示す国信号(L)が発生され、国信号(L)により、車両の縦方向操縦及び横方向操縦に関する国特有の情報を出力する運転者通報装置(6)が駆動され、かつ/又は国信号(L)が車両の縦方向操縦及び/又は横方向操縦を支援する少なくとも1つの運転者支援システム(7)へ供給される。更に本発明は、本発明による方法を実施する装置に関する。 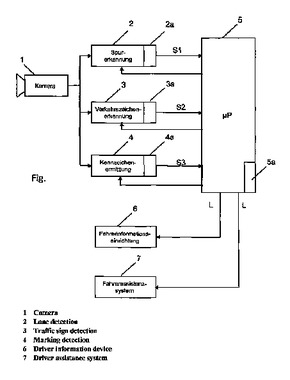 (もっと読む)
(もっと読む)
走行する車両における横揺れ角を評価する方法
本発明は、次の段階により走行する車両(7)の横揺れ角を評価する方法に関する。段階a)において、カメラ(8)により車両周辺特に前にある車道(1)の画像列を記録する。カメラ画像から、車道表面の少なくとも1つの記号(S1〜S6)を抽出従って求めて追跡する。1つ又は複数の後続のカメラ画像における少なくとも1つの記号(S1〜S6)の変化する位置から、段階c)において、どの横揺れ方向にカメラ(8)が回転されているかを確かめる。段階d)において横揺れ角の値を評価する。このため車両速度(v)及びカメラ(8)の写像モデルを考慮して、段階d1)において、横揺れ角の値を直接評価するか、又は評価される段階d2)において、横揺れ角がカメラ(8)の回転を十分補償するまで、反復して所定の修正角だけ横揺れ角を増大するか又は減少する。これから評価される横揺れ角が全修正値として生じる。 (もっと読む)
1 - 10 / 79
[ Back to top ]