
学校法人 中村産業学園により出願された特許
1 - 10 / 26
足背高測定法及びその測定法を使用した足型測定器
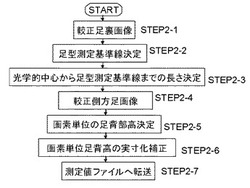
【課題】足型測定器において、撮像手段により足の側方を撮影する場合、撮像手段と足の距離を正確に測定できないことから足背部の高さの正確な測定ができないという不都合を解決し、足背高の正確な測定を含む足型測定器を提供すること。
【解決手段】足型測定器の撮像手段で取得した足裏画像において、第2足指の先端と踵の最後端を結ぶ線上の各点と撮像手段の光学的中心との距離を測ることにより、撮像手段と足との間の距離を特定できる。撮像装置と種々の距離での既知高の物体の画素単位での測定値と物体の実寸法との関係から変換式を事前に求めておくことにより、足の側方画像から求めた画素単位での足背高を実寸法に変換することができる。この手法により、足背高の測定を含む足型測定器を提供する。
(もっと読む)
プラズマ処理装置

【課題】本発明は、少量から大量の粉体を均一に大気圧グロープラズマ処理して、その表面に有用な官能基を付与するプラズマ処理装置を提供することを目的とするものである。
【解決手段】本発明は、中心電極2と、中心電極2と所定の空隙部5を介して配置された筒状の周辺電極3とを有する放電容器1と、中心電極2及び周辺電極3との間に連設された複数の仕切部16と、中心電極2表面若しくは周辺電極3表面の少なくとも一方に設けられた誘電体4と、放電容器1の一端側に設けられ、空隙部5に流体を注入可能に構成された流体注入手段と、放電容器1の他端側に設けられ、空隙部5から流体を排出可能に構成された流体排出手段と、中心電極2と周辺電極3との間に交流またはパルス電圧を印加した状態で、中心電極を回転中心として放電容器を回転せしめる回転手段とを備える。
(もっと読む)
位置測定装置、位置測定装置を用いた形状測定装置及び位置測定方法、並びに位置測定方法を用いた形状測定方法
【課題】測定対象物の位置測定装置、形状測定装置、位置測定方法、及び形状測定方法を提供する。
【解決手段】位置測定装置10は、支持部材14と、支持部材14に上端部が固定され自由状態で垂直配置された光ファイバー11と、光ファイバー11の下端部に設けられた探触子12と、光ファイバー11の上下方向中間位置にあって光ファイバー11の撓みを検知する光学振れ検知機構15と、測定対象物23を載せてX軸、Y軸、Z軸方向に測定対象物23を移動させるXYZステージ25と、光学振れ検知機構15及びXYZステージ25の制御部26とを有し、光ファイバー11は、光ファイバー11を揺らす振動手段30を介して支持部材14に取付けられ、探触子12がXYZテーブル25に載った測定対象物23に当接した場合の光ファイバー11の撓み量を光学振れ検知機構15で検知し、測定対象物23の特定部位の座標を検知する。
(もっと読む)
ハンドマッサージロボット
【課題】
手周辺を,手指,手のひら,手首に分けて,それぞれの部位を独立に効果的に刺激する,および,それぞれの部位への刺激を関連付けて刺激することによりマッサージ効果を高めるハンドマッサージロボットの開発。
【解決手段】
手指,手のひら,手首,それぞれに存在するツボに着目し,それらのツボを刺激することが可能なハンドマッサージロボット。このツボへの刺激により,手指,手のひら,手首,それぞれを効果的に刺激することが可能となった。加えて,このハンドマッサージロボットに,プログラムを備えることにより,それぞれの部位への刺激を関連付けて刺激することを可能とし,マッサージ効果を高めることに成功した。
(もっと読む)
集魚装置
【課題】実際の海面や海中の状況にリアルタイムに対応しつつ、魚を効果的に集めたり追い返したりできる集魚装置を提供する。
【解決手段】本発明の集魚装置1は、実装基板3と、実装基板3に実装されて海面10および海中11の少なくとも一方を照射する複数の発光素子4と、海面10および海中11の少なくとも一方の状況を示す海面情報を検出する検出部8と、海面情報に基づいて、複数の発光素子4の発光パターンを制御する制御部6と、を備える。この集魚装置1は、実際の漁業活動の場所の状況に最適化された発光パターンで、光を照射できる。
(もっと読む)
集魚装置
【課題】低消費電力および低ランニングコストを実現しつつ、魚を効果的に集めたり追い返したりできる集魚装置を提供する。
【解決手段】本発明の集魚装置1は、実装基板3と、実装基板3に実装される複数の発光素子4と、複数の発光素子4に電力を供給する電力供給部5と、複数の発光素子4の発光パターンを制御する制御部6と、を備える。この集魚装置1は、効果的に所望の種類の魚を集めたり追い返したりできる。更には、集魚装置1は、低いランニングコストによって使用でき、漁業関係者に有用な装置となる。
(もっと読む)
歩行介助ロボット
【課題】転倒を防止でき、残存する随意性を生かすことのでき、疲労が少なく長時間の訓練ができ、移動式の歩行訓練が可能な歩行介助ロボットを提供する。
【解決手段】被介助者の歩行を訓練する駆動部と、体幹の運動を計測するセンサ、下肢の運動を計測するセンサ、腕の振りを計測するセンサを備え、各センサの計測結果から被介助者が転倒するか否かを判定し、「転倒」と判断した場合にはこれを防ぐ指令を生成し、「転倒でない」と判断した場合には通常訓練を続行し、前記駆動部が、被介助者の前後・左右旋回への身体全体の移動を介助・抑制し、かつ腰の揺動の一部を介助・抑制する独立二輪駆動の駆動輪12Wを備えた移動部と、腰の揺動の他の一部を介助・拘束し、かつ腕の振りを入力する腕振り入力部による入力を介助・抑制する体幹支持部130と、被介助者の股・膝・足の関節まわりの下肢の運動を介助・抑制する下肢駆動部140を備えた。
(もっと読む)
内燃機関用エンジンの動弁装置
【課題】カムとシムとバルブリフタとの間のフリクションの低減が十分に図られた内燃機関用エンジンの動弁装置の提供。
【解決手段】バルブリフタ10の上端面11Aには円盤状の凹部11aが形成されている。凹部11aの軸心は、後述するシャフト31の軸方向へバルブリフタ10の軸心から離間して配置されている。シム20は円盤状をなしており、凹部11aの直径はシム20の直径よりも僅かに大きい。シム20は、凹部11aに当該凹部11aと略同軸的な位置関係でバルブリフタ10に対して摺接回転可能に収容されている。シム20の上面20Bに当接するカム30の外周面30Bの部分であってシャフト31の軸方向におけるカム30の外周面30Bの中央部は、バルブリフタ10の軸心上に配置されている。
(もっと読む)
身障者用起立運動装置
【課題】下肢機能障害者が立位状態で上肢運動及び足の屈伸を行える身障者用起立運動装置を提供する。
【解決手段】身障者用起立運動装置10は、ベース架台11の前側中央に設けられ、中央軸受部材12が設けられた支持コラム13と、中央軸受部材12に基部が挿入された左右の水平軸14、15の先部にそれぞれ設けられ、左把手16が固定された左軸受部材17、及び右把手18が固定された右軸受部材19と、水平軸14、15にそれぞれ固定され、前後方向の運動を逆方向に規制された左ステップ駆動ロッド20及び右ステップ駆動ロッド21と、左ステップ駆動ロッド20及び右ステップ駆動ロッド21にそれぞれ連結された左ステップ補助台28及び右ステップ補助台29に支持され、前側位置では前上がり傾斜に、後側位置では後上がり傾斜に保持される左右の足載せ台34、35と、左右の膝ホルダー39、40と、胸当て42と、腰当てバンド44とを有する。
(もっと読む)
粉体のプラズマ処理方法
【課題】本発明は、安定したグロー放電環境下での高濃度の窒素官能基を付与することを可能とした粉体のプラズマ処理方法を提供することを目的とするものである。
【解決手段】本発明は、中心電極2と、中心電極2と所定の空隙部5を介して配置された筒状の周辺電極3と、中心電極2表面若しくは周辺電極3表面の少なくとも一方に設けられた誘電体4とを有する放電容器1を用いた粉体のプラズマ処理方法であって、不活性気体雰囲気とされた空隙部5内で、粉体と、粉体に窒素官能基を付加する窒素官能基供給部材にグロー放電によるプラズマ処理を行なう工程を備える。
(もっと読む)
1 - 10 / 26
[ Back to top ]