
有限会社ピノキオにより出願された特許
1 - 10 / 10
塗料自動供給型ダブルローラ塗装ユニット
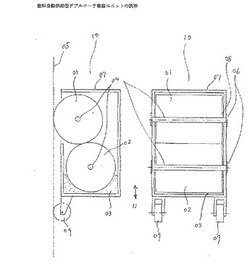
【課題】塗料を自動供給する塗装ユニットを実現する。
【解決手段】塗装バケツ07から塗装面05側に突出する形で回転自由に取り付けたスポンジ製の塗装ローラ01に、軽く接触するように塗装ローラ01よりも下側にスポンジ製の転写ローラ02を回転自由に取り付けた塗装バケツ07の底から転写ローラ02の半分程度まで塗料03を入れ、塗装ローラ01を壁に押付け上下に動かすことにより塗装ローラ01が回転し、同時に転写ローラ02も回転するため、転写ローラ02から塗装ローラ01に塗料03が転写されることにより塗料03が自動で供給される。
(もっと読む)
塗料自動供給型塗装ユニット

【課題】塗料を自動供給する塗装ユニットを実現する。
【解決手段】表面にスポンジ1を貼り付けたベルト2をループ状にした塗装クローラ3を、回転自由に塗装バケツ7にピン8を介して取り付けられた上部の回転ローラ4と、下部の回転ローラ6で上下に張るように配置し、塗装クローラ3の上部の回転ローラ4を壁5に押し付けるようにし、下部の回転ローラ6を塗装バケツ7に浸かるようにすることにより、上下に動かすとベルト2が回転し塗料を自動で供給する。
(もっと読む)
重力利用2足歩行機構
【課題】高級な部品、及び高度な制御技術を使わずに安価な2足歩行を実現する。
【解決手段】並行リンク機構の可動角を制限した脚機構に、外側が浮くように足を取付けた機構を、両側対象に配置し、腰板で結合した2脚機構の上に、左右の重心を変化させられる機構を設けた胴体を搭載した機構において、前進する方向に胴体が位置するよう並行リンク機構を曲げ、この状態にて左右方向の重心を変化させることにより片方の足を浮かし、浮いた足が重力により前に出るが、次に反対方向に重心を移動させ本体をかた向け、その時先に述べた反対足が前進した距離だけ全体が移動し、同時に反対の浮いた足が重力により前に出ることを交互に繰り返しことにより前進する重力利用の2足歩行機構。
(もっと読む)
人型機械
【課題】
マネキンや人形、ロボットなど人型機械に対し、ファッションモデルのように人の情動を呼び起こす魅力的で美しい下肢の動作制御を行うこと。
【解決手段】
関節が駆動する身体を持つマネキンやロボットなどの人型機械で、腰と脚が連動してファッションモデルのようなポーズをとるための美しい動きの表現方法と機構。
左右脚交差動作と左右股関節の前後揺動動作の同期による連動や、脚の旋回動作と股関節の上下
揺動の同期による連動により、下肢の美しい表現を可能にした。
(もっと読む)
オブラートをかぶせるシーラント整形工法
【課題】建物のクラック、目地の補修工事において、シーラント塗布を実施する際、粘性ゆえに整形が困難であった。素人でも整形できる工法が望まれている。
【解決手段】シーラントを塗布した後、上からオブラートをかぶせ、ローラ等で整形する。
または、オブラートをテープ状にして、転がすように塗布したシーラントの上にかぶせ、テープを切断後ローラ等で整形する施工方法。
(もっと読む)
塗布装置および移動体
【課題】塗料の塗布に適した塗布装置の提供
【解決手段】塗布装置10は、ベース部材11と、ベース部材11に取り付けられたスポンジ12と、ベース部材11側からスポンジ12に塗料を供給する供給ポンプ13とを備えている。スポンジ12は、供給ポンプ13が塗料を供給する部分22に供給ポンプ13から供給された塗料が溜まる窪み31が形成されている。かかる塗布装置10は、クローラ型壁面吸着走行装置1000のような移動体に取り付けられるのに適している。
(もっと読む)
人型機械
【課題】マネキンや人形、ロボットなど人型機械に対し、人の情動を呼び起こす魅力的で美しい胴体の動作制御を行うこと。
【解決手段】胸部201と腰部202から成る胴体を持つマネキンやロボットなどの人型機械で、肩と腰が連動する美しい動きの表現方法と機構を持たせる。胸部201と腰部202が捻れる動きと同時に、胸部と腰部の左右体側の肩203・204と股関節205・206との距離が交互に開く揺動が同期して連動することで、胴体の美しい表現を可能にした。
(もっと読む)
クローラ型壁面吸着走行ロボット
【課題】クローラ型壁面吸着走行ロボットの信頼性向上、走行性能の向上、低コスト化
【解決手段】クローラ型壁面吸着走行ロボット1000は、スプロケット200cの回転軸201c周りで検知されるクローラ板に基づいて、フレームに対して下側に位置するクローラ板の吸気孔に取り付けられた吸気装置500を作動させる制御装置600とを備えている。また、吸着パッド403が回転可能なクローラ板401を設け、クローラ型壁面吸着走行ロボット1000が方向転換可能な構造にすることもできる。
(もっと読む)
クローラ型壁面吸着走行ロボット
【課題】 クローラ型壁面吸着走行ロボットの構造の簡素化、走行性能向上
【解決手段】 このクローラ型壁面吸着走行ロボット10は、略矩形のフレーム11の左右両側、内側に、前側と後側に、それぞれ対向させて取り付けた一対のスプロケット12〜15と、スプロケット14を回転駆動させる駆動手段16と、前後左右のスプロケット12〜15に掛け回してフレーム11の内側に張設した、複数のクローラ板51を無端チェーン状に連結したクローラチェーン17と、クローラ板51の外側面に取り付けたベローズ18と、ベローズ18の先端に取り付けた吸着パッド19と、吸着パッド19内の空気を吸引する吸引手段20と、フレーム11の下側に位置するクローラ板の吸引手段を作動させる制御手段21とを備えている。
(もっと読む)
回転2足歩行ロボット
【課題】高級な部品、及び高度な制御技術を使わずに安価な2足歩行を実現する。
【解決手段】ベース1の下に、平行リンク機構2で構成し、リンクを駆動できる足を2本、同じ平面で動くよう取り付け、地面側のリンク3に対し回転軸4を地面側のリンク3と垂直でかつ、先の平面内にあるように回転する円盤5を取り付けた脚機構において、歩行する場合は、平行リンク機構の足を2本とも左に傾け、重心を左に移し、重心と反対側の足を右に移動して浮かし、重心側の左足を回転し、ある量回転したら、重心と反対側の足を左に移動し地面に着地させる。次に平行リンク機構の足を2本とも右に傾け、重心を右に移し、重心と反対側の足を左に移動し浮かし、重心側の右足を回転し、ある量回転したら、重心と反対の足を右に移動し地面に着地させる。以上を繰り返し歩行移動する。
(もっと読む)
1 - 10 / 10
[ Back to top ]