
レイセオン カンパニーにより出願された特許
51 - 60 / 244
体積を小さくした多帯域の放射線検出器及び当該放射線検出器の作製方法
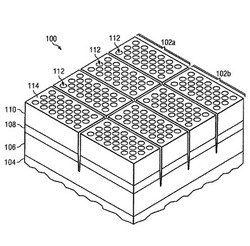
【課題】 赤外検出器は、様々なノイズ源によって望ましくない影響を受ける。しかも一部の赤外検出器は、たとえば熱的に励起された電流キャリアによって発生するノイズを減少させるため、液化窒素温度(77K)以下の温度で動作するように冷却される。
【解決手段】 広帯域放射線検出器は第1型の電気伝導を有する第1層を有する。第2層は、第2型の電気伝導及び第1スペクトル領域内の放射線に応答するエネルギーバンドギャップを有する。第3層は、ほぼ前記第2型の電気伝導、及び、前記第1スペクトル領域の波長よりも長い波長を有する第2スペクトル領域内の放射線に応答するエネルギーバンドギャップを有する。当該広帯域放射線検出器は複数の内部領域をさらに有する。各内部領域は少なくとも部分的に前記第3層内部に設けられて良い。各内部領域は、前記第3層の屈折率とは異なる屈折率を有して良い。前記複数の内部領域は規則的に繰り返されるパターンに従って配置されて良い。
(もっと読む)
レーザーの試験をすることに光学的なアイソレーターを使用するためのシステム及び方法
一つの実施形態に従った、方法は、パルス検出器で第一の光学的な信号を受信することを含む。第一の光学的な信号の電子的なパルスは、光学的なモジュールで受信される。第二の光学的な信号は、電子的なパルスに基づいた光学的なモジュールで発生させられる。第一の光学的な信号の少なくとも一部分は、光学的なイソレーターで逆の方向において受信されると共に、第二の光学的な信号は、光学的なアイソレーターで前進の方向において受信される。光学的なアイソレーターは、実質的に、前進の方向においてターゲットまで第二の光学的な信号を送信する。光学的なアイソレーターは、実質的に、逆の方向において第一の光学的な信号の少なくとも一部分を減衰させる。 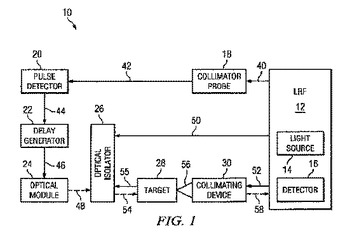 (もっと読む)
(もっと読む)
移動式コンピューティング車輛に組み込んだ一体化オペレータ作業空間

【課題】移動式コンピューティング車輛に組み込まれるようになった一体化オペレータ作業空間を提供する。
【解決手段】一体化オペレータ作業空間は、長さ方向第1縁部及び長さ方向第2縁部を持つベースを有する。第1オペレータコンピューティングステーションがベースの長さ方向第1縁部と隣接して配置されており、第2オペレータコンピューティングステーションがベースの長さ方向第2縁部と隣接して配置されている。この構成では、第1及び第2のオペレータコンピューティングステーションは第1の所定の空間によって互いから離間されており、これにより、第1オペレータステーションで作業をしている第1使用者及び第2オペレータステーションで作業をしている第2使用者が一体化オペレータ作業空間に妨げなく出入りできる。
(もっと読む)
導波管変換器への低損失広帯域平面伝送路
平面誘電体基板に形成された伝送線路と中空導波管との間でマイクロ波信号を結合する変換器は、中空導波管の開放端部内に延びる誘電体基板の延長部に形成されたハーフノッチアンテナを含み得る。 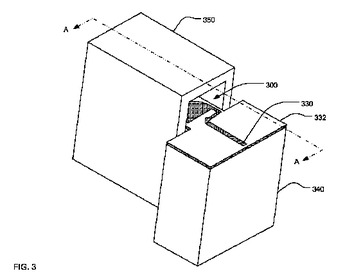 (もっと読む)
(もっと読む)
非線形勾配補償を使用してデータを処理する方法及びシステム
局部的な勾配を補償する非線形方法を使用して、画像又は他のデータを処理するシステム及び装置が、記載されている。1つの実施では、メディアンフィルタのような非線形フィルタを使用して、画像又は他のデータセット中のサンプル値の勾配を1つ以上の方向で推定する。推定勾配値を使用して、対象のサンプルのうちの少なくとも幾つかの値を補償して、勾配の影響を取り除く。次に、対象のサンプル中にターゲットが存在するかどうかを決定するために、又は他の目的のために、補償された値が処理され得る。 (もっと読む)
指向された赤外線対抗策(DIRCM)システムのための軸外れの反射送信望遠鏡
DIRCMシステムのための軸外れの反射送信望遠鏡は受信望遠鏡の光軸から側方にオフセットされた送信軸に沿ってジンバル上に取付けられ、通常はレーザビームを送信するために受信望遠鏡の視線と整列されている。望遠鏡はレーザビームをドームから受信及び誘導するため光学的にレーザに結合された光ポートと、レーザビームをドームを通して反射する反射光アセンブリを有する。反射光アセンブリは光軸からの送信望遠鏡の送信軸のオフセットにより誘起されるドーム収差についてレーザビームを共に予め補償する軸外れのミラーセグメントと第2の光素子を有する。軸外れのミラーセグメントは対称軸を中心に非球面のベース曲率(例えば放物状、楕円形または高次の非球面)を有するペアラントミラーのセグメントを有している。セグメントはこれがペアラントミラーの対称軸からオフセットされている。軸外れのミラーセグメントの使用により光ポート及び任意の折畳みミラーが位置されることが可能であり、それによってこれらは反射されたレーザビームを妨害しない。第2の光素子はドームコレクタペアラントレンズのセグメント、プリズム、または軸外れのミラーセグメントの前表面上に形成された屈折レンズであることができる。 (もっと読む)
飛行における方向転換および姿勢制御のためのシステム及び方法
飛行ビークルにおけるスラスタ制御のためのシステム及び方法が提供される。このシステム及び方法は方向転換及び姿勢制御(DAC)システムでスラストコマンドを決定するために比例微分マトリックス制御技術を使用する。比例微分マトリックス制御システム400は入力としてピッチ、ロール、ヨーコマンド404を受信し、出力としてスラストコマンド410を発生するように構成されている。比例微分マトリックス制御装置の性能により、スラストコマンドが減少された燃料消費で、所望の姿勢角度を迅速に実現できる。マトリックス制御システムは異なるモーメントアームを有する非対称スラスタを含む種々のスラスタを効率的に制御できる。マトリックス制御システムは姿勢制御用に構成された非対称スラスタを有するDACシステムの制御に特に適している。 (もっと読む)
調節可能なシムを有する光学システム
光学システムは焦点平面アレイのような検出器とその検出器を支持するフレーム(マウント)との間の結合中にアクチュエイタを含んでいる。アクチュエイタはそれらに電圧を与えることにより調節される厚さを有することができる付勢されたピエゾ電気シムであることができる。アクチュエイタ(シム)の厚さの調節はフレーム(および光学システムの他の部分)に関して検出器の傾斜及び焦点(軸方向位置)を制御するのに使用されることができる。光学システムは宇宙船または航空機、例えばミサイルのような飛行ビークルの一部であることができる。システムは温度センサと、例えば検索表を使用して温度に基づいて付勢されたシムの厚さを調節する制御システムを含むことができる。 (もっと読む)
姿勢制御スラスタを使用してミサイルの飛行を制御する方法
ミサイルの飛行を制御する方法は、ミサイルの角度の変化率に基づく係数が閾値を超えたときを感知するために、ピッチレートジャイロスコープのようなジャイロスコープを使用することを含む。閾値を超えると、1つ以上の補償スラスタを使用して、角度の変化率を下げることが決定され得る。補償スラスタを使用すると、残留角運動速度が修正され得る。残留角運動速度は、意図した針路にミサイルを置くために使用される軌道修正操縦に起因する。更に、軌道修正操縦後にもたらされる、例えば、ミサイルのメインロケットモータによって与えられるスラストの調整不良によってもたらされる、ミサイルの機首方位における誤差を補償するために、補償スラスタが使用され得る。ピッチとヨーの方向における角度の変化を補償するために、複数の補償スラスタが使用され得る。 (もっと読む)
紫外線放射光線を用いた捜索および救援
捜索および救援システムは、放射光線を放出する放射光線源を含む救援ビーコンを含む。放射光線の少なくとも一部は、紫外線c−帯域放射光線を含む。また、本システムは、救援ビーコンを突き止めることを可能にするために、紫外線c−帯域放射光線を検出する紫外線c−帯域検出器を含む。 (もっと読む)
51 - 60 / 244
[ Back to top ]